So Sánh Motor Điện Đồng Bộ Và Motor Điện Không Đồng Bộ

Bạn đang choáng ngợp trước "ma trận" Motor điện? Đừng lo lắng, bài viết này chính là "cứu cánh" cho bạn! So Sánh Motor Điện Đồng Bộ Và Motor Điện Không Đồng Bộ sẽ dẫn dắt bạn khám phá thế giới đầy "kỳ thú" của hai "chiến binh" này.
Hiệu suất, mô-men xoắn, tốc độ quay, độ bền, giá thành - tất cả yếu tố then chốt đều được "mổ xẻ" chi tiết, so sánh "kỹ lưỡng". Bằng cách "giải mã" bí mật của từng loại Motor, bạn sẽ dễ dàng lựa chọn "người hùng" phù hợp nhất cho "trận chiến" công suất của riêng mình.
Nội dung
1. Khái niệm động cơ điện đồng bộ và không đồng bộ
Trước khi tiến hành so sánh động cơ điện đồng bộ và không đồng bộ theo từng phương diện cụ thể, chúng ta hãy cùng tìm hiểu về khái niệm của 2 loại động cơ này.
Động cơ điện không đồng bộ: Tất cả các loại động cơ hoạt động dựa trên nguyên tắc cảm ứng điện từ ngày nay (tiếng Anh: induction motor – tạm gọi là động cơ điện từ) đều được xem là động cơ không đồng bộ.
Bản chất không đồng bộ của động cơ căn cứ vào việc vận hành động cơ điện từ được đến từ sự trượt giữa tốc độ quay của từ trường tương ứng với tốc độ quay chậm hơn của rotor. Còn nguyên nhân tại sao lại có sự trượt này thì lại thuộc về một vấn đề chuyên sâu hơn, chúng ta sẽ bàn trong một dịp khác.

Roto lồng sóc - một bộ phận chủ yếu của động cơ không đồng bộ
Động cơ điện đồng bộ: Động cơ đồng bộ chính là 1 cấu trúc động cơ vô cùng đặc biệt mà rotor chuyển động quay cùng tốc độ với tốc độ của từ trường stator (nên mới được gọi là đồng bộ). Một ví dụ nữa của động cơ đồng bộ chính là động cơ bước, thường được sử dụng nhiều trong các ứng dụng có liên quan đến quá trình điều khiển vị trí (chẳng hạn như tay vận hành robot của các nhà máy).
Tuy nhiên, với sự phát triển trong những năm gần đây của các mạch điện tử công suất, chúng ta đã có thể tối ưu những thiết kế của động cơ đồng bộ để có thể sử dụng cho các ứng dụng khác với công suất cao hơn, chẳng hạn như máy quạt, máy sấy và thậm chí là động cơ của các loại xe địa hình.
Động cơ đồng bộ chính là 1 cấu trúc động cơ vô cùng đặc biệt
2. So sánh động cơ điện đồng bộ và không đồng bộ
2.1. Khác nhau về cấu tạo
Động cơ điện đồng bộ:
Hầu hết các động cơ điện từ đồng bộ ngày nay đều có một thành phần quay (còn gọi là roto) hay là phần cảm, bộ phận này được mô phỏng kiểu cái lồng sóc, vì trông nó giống như cái lồng sắt để nhốt con sóc vậy.
Cái “lồng sóc” này thường bao gồm nhiều thanh đồng hoặc nhôm được bố trí như hình trên, đồng thời nối với nhau bằng 2 vòng dẫn điện nằm ở 2 đầu, làm cho các thanh bị ngắn mạch hoàn toàn với nhau. Phần lõi của rotor thường được làm bằng thép.
Bạn có thể nhìn thấy được các rãnh chạy dọc theo phần rotor và số lượng rãnh của rotor thường nhỏ hơn rãnh của stator. Đồng thời, số lượng rãnh trên rotor cũng không được là ước của stator nhằm mục đích tránh gặp phải tình trạng mắc kẹt từ trường (tiếng Anh: magnetic interlock) trong khi khởi động động cơ.
Bên cạnh động cơ roto lồng sóc, chúng ta cũng còn nhìn thấy nhiều loại động cơ có sử dụng các cuộn dây. Lợi thế của kiểu cấu tạo này chính là có thể giảm bớt được dòng khởi động của các loại động cơ nhờ vào các điện trở của chúng được đấu nối tiếp thẳng vào mỗi cuộn dây.
Các cuộn dây lúc này sẽ sản sinh ra dòng điện nhờ vào kiểu bố trí 1 vòng trượt. Khi động cơ đã đạt được đến tốc độ mong muốn thì nó sẽ được chuyển qua 1 vòng ngắn mạch. Và khi đó, nó sẽ vận hành cũng giống như động cơ lồng sóc.
Rotor của động cơ không đồng bộ bao gồm các vòng thép cùng với các dãy răng. Các răng này đều có tính từ thẩm (nên chúng có thể bị từ hóa), và các khu vực xung quanh đó thì cũng có độ từ thẩm nhưng yếu. Do đó, phần rotor này không cần đến các cuộn dây cũng như các vật liệu hiếm hoặc là nam châm.
Động cơ không đồng bộ không giống với động cơ điện từ, cũng không có các thanh rotor hay dòng điện tạo ra mô men trong rotor. Sự thiếu vắng của các thiết bị dẫn ở trên rotor từ trở thay đổi sẽ giúp giảm bớt những tổn hao trên động cơ so với các động cơ điện thông thường.
Mô men tạo ra bởi động cơ từ trở này sẽ được điều khiển bằng cách thay đổi cường độ dòng điện bên trong trường điện từ của stator. Tốc độ của chúng được điều khiển bằng cách điều khiển mô men (thông qua các dòng của cuộn dây). Kỹ thuật này cũng tương tự như cách điều khiển tốc độ động cơ bằng dòng điện phần ứng bên trong động cơ DC sử dụng chổi than truyền thống.
Một động cơ từ trở sẽ tạo ra từ trường có tỷ lệ với dòng điện được đưa vào cuộn dây. Việc tạo ra 1 mô men không bị ảnh hưởng hay chi phối bởi tốc độ động cơ. Đây chính là điểm khác biệt của động cơ DC so với động cơ điện từ AC, trong khi tốc độ quay cao ở vùng từ trường bị yếu thì dòng rotor sẽ tăng độ trễ pha hơn so với từ trường stator để cho tốc độ motor (rpm) tăng lên.
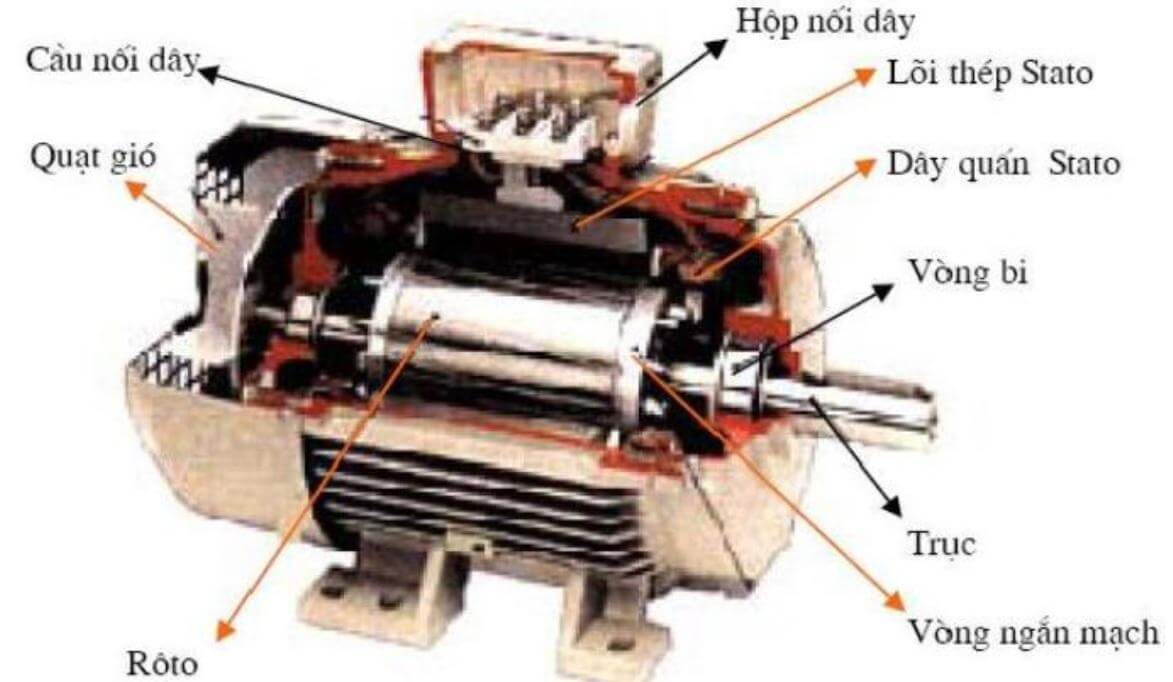
Sơ đồ cấu tạo động cơ điện không đồng bộ
2.2. Ứng dụng trong thực tế
Cuộn dây stato của động cơ điện không đồng bộ thường được kết nối vào lưới điện xoay chiều, do đó cuộn dây rôto cũng không cần phải kết nối với các nguồn điện khác. Động cơ không đồng bộ lúc này có hiệu suất vận hành cao hơn, do đó, đặc tính làm việc cũng tốt hơn và chúng cũng tương đồng với hoạt động tốc độ không đổi từ không tải cho đến phạm vi đầy tải. Động cơ có thể đáp ứng các yêu cầu truyền tải của tất cả các máy móc sản xuất công nghiệp cũng như nông nghiệp.
Động cơ điện không đồng bộ cũng sẽ dễ dàng tạo ra các mẫu bảo vệ khác nhau để giúp cho động cơ phù hợp với các điều kiện của môi trường khác nhau. Khi động cơ điện không đồng bộ đang hoạt động, công suất phản kháng của chúng phải được rút ra khỏi lưới điện để giúp cho hệ số công suất của lưới điện suy giảm.
Động cơ đồng bộ: Thường được sử dụng để điều khiển các thiết bị cơ khí có công suất cao nhưng tốc độ thấp, chẳng hạn như máy nghiền bi và máy nén khí. Do tốc độ của động cơ điện không đồng bộ có 1 sự khác biệt nhất định về tốc độ quay cùng với từ trường quay, cho nên hiệu suất điều chỉnh của tốc độ kém đi (ngoại trừ bộ phận động cơ cổ góp AC).
Đó là một giải pháp kinh tế và thuận tiện để cho chúng ta sử dụng động cơ DC dành cho máy móc vận chuyển, nhà máy cán tôn, các máy móc công cụ lớn, máy in, máy nhuộm và công việc sản xuất giấy đòi hỏi 1 phạm vi tốc độ rộng lớn và trơn tru hơn.
2.3. Độ bền và khả năng tiết kiệm năng lượng
Động cơ đồng bộ đòi hỏi có 1 nguồn điện DC bổ sung vào để cung cấp năng lượng cho bộ phận cuộn dây roto. Động cơ cảm ứng cũng không yêu cầu bất kỳ 1 nguồn năng lượng bổ sung nào. Vòng trượt và bàn chải của nó cũng được yêu cầu sử dụng trong động cơ đồng bộ nhưng không phải là trong động cơ cảm ứng.
Động cơ đồng bộ luôn yêu cầu cơ chế khởi động cần bổ sung để vận tốc quay rôto gần với tốc độ của động cơ đồng bộ. Tuy nhiên, động cơ cảm ứng lại không có cơ chế khởi động. Do đó, hệ số công suất của động cơ đồng bộ hiện nay có thể được điều chỉnh để trở thành độ trễ, thống nhất hoặc có thể dẫn đầu bằng cách thay đổi nguồn kích thích. Trong khi đó, động cơ cảm ứng lại luôn hoạt động ở hệ số công suất trễ.
Động cơ điện đồng bộ thường hoạt động hiệu quả, có độ bền cao hơn là động cơ cảm ứng. Tuy nhiên, động cơ đồng bộ lại có chi phí đắt đỏ hơn. Do đó, động cơ không đồng bộ sẽ có khả năng tiết kiệm năng lượng và chi phí thấp hơn.

Động cơ không đồng bộ giúp tiết kiệm năng lượng và chi phí thấp hơn
2.4. So sánh về hiệu suất làm việc
Động cơ đồng bộ: Các cực của stato chuyển động quay với tốc độ đồng bộ (Ns) khi chúng được cung cấp cùng với nguồn cung cấp 3 pha. Các cánh quạt thông thường được cung cấp với 1 nguồn cung cấp động cơ DC. Rôto cần được quay với tốc độ tương đương với tốc độ đồng bộ trong suốt quá trình khởi động.
Nếu đúng là được thực hiện như vậy thì các cực của rôto sẽ được ghép từ tính với các cực của stato chuyển động quay và khi đó, phần rôto bắt đầu quay bằng với tốc độ đồng bộ. Động cơ điện đồng bộ luôn chạy ở tốc độ bằng với tốc độ đồng bộ của nó, tức là tốc độ trên thực tế sẽ bằng với tốc độ đồng bộ theo cách tính như sau: N = Ns = 120f/ P.
Động cơ cảm ứng: Khi stato đã được cung cấp với 1 nguồn cung cấp động cơ AC 2 pha hoặc 3 pha, khi đó từ trường quay (RMF) sẽ được tạo ra. Tốc độ tương đối giữa từ trường quay của phần stato và roto sẽ sản sinh ra dòng điện cảm ứng ở trong các dây dẫn của rôto. Dòng điện rôto sẽ làm tăng cường thông lượng rôto.
Theo như định luật của Lenz, hiện tại hướng của dòng điện cảm ứng này sẽ có xu hướng chủ yếu là chống lại nguyên nhân sản sinh ra nó, tức là tỷ lệ nghịch với tốc độ tương đối giữa RMF trong stato với roto. Do đó, rôto lúc này cũng sẽ cố gắng bắt kịp với tốc độ của RMF và làm giảm dần tốc độ tương đối. Động cơ cảm ứng luôn hoạt động ở tốc độ nhỏ hơn của tốc độ đồng bộ, tức là N <Ns.
3. Ví dụ cụ thể về ứng dụng:
Động cơ điện đồng bộ:
- Máy tiện, máy phay, máy CNC: Đòi hỏi tốc độ quay chính xác để đảm bảo gia công chi tiết đạt độ chính xác cao.
- Máy giặt, máy sấy: Cần tốc độ quay ổn định để đảm bảo hiệu quả giặt sấy.
- Máy nén khí: Cần tốc độ quay cố định để đảm bảo hiệu quả nén khí.
Động cơ điện không đồng bộ:
- Máy bơm, quạt: Cần mô-men xoắn lớn để hoạt động hiệu quả.
- Máy kéo, băng tải: Cần khả năng di chuyển tải trọng lớn.
- Máy điều hòa: Cần hoạt động êm ái và tiết kiệm năng lượng.
4. So sánh chi tiết:
| Tiêu chí | Động cơ điện đồng bộ | Động cơ điện không đồng bộ |
|---|---|---|
| Cấu tạo | Phức tạp hơn | Đơn giản hơn |
| Nguyên lý hoạt động | Dựa vào sự đồng bộ giữa tốc độ quay của roto và từ trường quay | Dựa vào sự trượt giữa tốc độ quay của roto và từ trường quay |
| Hiệu suất | Cao hơn | Thấp hơn |
| Ưu điểm | Tốc độ quay chính xác, hiệu suất cao | Cấu tạo đơn giản, dễ bảo trì, giá thành rẻ |
| Nhược điểm | Cấu tạo phức tạp, giá thành cao, cần nguồn điện DC kích từ | Hiệu suất thấp hơn, tốc độ quay không chính xác |
Kết luận
Bài viết đã so sánh chi tiết hai loại động cơ điện phổ biến nhất hiện nay: động cơ điện đồng bộ và động cơ điện không đồng bộ. Qua bài viết, người đọc có thể nắm bắt được những điểm khác biệt cơ bản về cấu tạo, nguyên lý hoạt động, ưu điểm, nhược điểm và ứng dụng của hai loại động cơ này.
Nội Dung Có Thể Bạn Quan Tâm:
- Động Cơ Không Đồng Bộ 3 Pha Roto Lồng Sóc: Nguyên Lý Làm Việc Và Sơ Đồ Khởi Động
- Cấu Tạo Và Nguyên Lý Hoạt Động Của Động Cơ Không Đồng Bộ 3 Pha, Cách Phân Loại
- Motor Điện 3 Pha Xuất Khẩu Châu Âu, Cấu Tạo, Ký Hiệu, Tiêu Chuẩn Thiết Kế
- Giá Motor 3 Pha Hitachi Toshiba Mitsubishi Nhật, ABB, Siemens Đức, Giá Quấn Lại Motor Toàn Quốc
- Biến Tần Điều Khiển Tốc Độ Motor 3 Pha, Lợi Ích, Khái Niệm
- Động Cơ Parma, Thương Hiệu Bán Chạy Nhất Việt Nam, Quy Mô Tập Đoàn
- Cách Đấu Điện Motor 1 Pha, Đấu tụ, Đảo Chiều Tùy Ý