Khám phá Bí Quyết Điều Khiển Động Cơ RC Servo Chính Xác Bằng STM32F4

Điều khiển động cơ RC Servo bằng STM32F4 không chỉ là một thử thách kỹ thuật mà còn là cơ hội để bạn khám phá sức mạnh của tín hiệu PWM và khả năng linh hoạt của vi điều khiển hiện đại. Với các kỹ sư và nhà phát triển, đây là cách để tối ưu hóa góc quay động cơ, đảm bảo độ chính xác và hiệu suất cao nhất. Nếu bạn đang tìm kiếm sự kết nối giữa lý thuyết và thực tế, bài viết này sẽ là cầu nối lý tưởng cho bạn.
Giới thiệu
Động cơ RC Servo là một phần quan trọng trong các hệ thống cơ khí và điện tử, giúp điều khiển chính xác chuyển động quay theo góc mong muốn. STM32F4, với lõi ARM Cortex-M4, không chỉ là vi điều khiển mạnh mẽ mà còn là giải pháp tối ưu trong việc điều khiển tín hiệu PWM, tạo ra độ chính xác cao cho động cơ Servo. Sự kết hợp này mang lại lợi ích lớn trong các ứng dụng từ robot, tự động hóa đến sản xuất công nghiệp.
Nguyên lý hoạt động của RC Servo
Cấu trúc và cơ chế hoạt động
Động cơ RC Servo được cấu thành từ ba thành phần chính: động cơ DC, bộ bánh răng truyền động và bộ điều khiển tín hiệu. Bên trong, bộ bánh răng truyền động giúp giảm tốc độ quay từ động cơ, đồng thời tăng mô-men xoắn để đạt được góc quay ổn định. Bộ điều khiển tín hiệu đảm bảo rằng động cơ phản hồi chính xác với các tín hiệu PWM đầu vào.
Nguyên lý điều chế độ rộng xung (duty cycle) là cốt lõi trong việc điều khiển góc quay động cơ Servo. Với tín hiệu PWM, độ rộng xung thay đổi trong mỗi chu kỳ sẽ quyết định góc quay cụ thể. Điều này đảm bảo tính linh hoạt và chính xác, đáp ứng được nhu cầu của các hệ thống cơ khí yêu cầu cao.
Tín hiệu PWM trong điều khiển Servo
Tín hiệu PWM là dạng tín hiệu có chu kỳ dao động nhất định, thường được cấu hình với tần số 50Hz và chu kỳ tín hiệu 20ms. Trong phạm vi điều khiển động cơ RC Servo, các độ rộng xung phổ biến bao gồm 1ms tương ứng góc 0 độ, 1.5ms cho góc 90 độ và 2ms cho góc 180 độ. Những thay đổi nhỏ trong độ rộng xung sẽ dẫn đến các góc quay khác nhau, mang lại khả năng kiểm soát động cơ Servo mượt mà và chính xác.
Để đảm bảo tín hiệu PWM đạt độ chính xác cao, việc cấu hình tần số và chu kỳ xung phù hợp là rất quan trọng. Tần số ổn định và biên độ tín hiệu chính xác sẽ giảm thiểu sai số, tăng độ nhạy và hiệu suất của động cơ Servo.
Xem thêm: Tổng quan về motor điện
Giới thiệu vi điều khiển STM32F4
Tổng quan về STM32F4
STM32F4 được trang bị lõi ARM Cortex-M4, mang lại khả năng xử lý mạnh mẽ và hỗ trợ các ứng dụng nhúng phức tạp. Các bộ định thời (timer) tích hợp trên STM32F4 cho phép tạo tín hiệu PWM chính xác trên các chân GPIO. Ngoài ra, STM32F4 hỗ trợ nhiều giao thức như UART, SPI, I2C và ADC, giúp nó trở thành giải pháp toàn diện cho các ứng dụng điều khiển và tự động hóa.
Bộ định thời là yếu tố quan trọng giúp STM32F4 tạo ra tín hiệu PWM phù hợp để điều khiển động cơ RC Servo. Với sự hỗ trợ từ các thư viện như HAL và LL, việc lập trình và cấu hình tín hiệu PWM trên STM32F4 trở nên nhanh chóng và thuận tiện hơn bao giờ hết.
Lợi thế của STM32F4 trong điều khiển động cơ Servo
STM32F4 có khả năng cấu hình tín hiệu PWM linh hoạt, đáp ứng nhiều nhu cầu khác nhau trong điều khiển động cơ Servo. Tính năng điều chỉnh tần số PWM từ 50Hz đến 1kHz giúp tối ưu hóa hiệu suất động cơ trong các ứng dụng cụ thể. Ngoài ra, độ chính xác trong việc điều chế độ rộng xung (duty cycle) cho phép động cơ đạt được các góc quay mong muốn một cách ổn định.
Thư viện lập trình của STM32F4 cung cấp các công cụ mạnh mẽ để triển khai các thuật toán điều khiển PID và vòng điều khiển kín. Điều này không chỉ tăng độ chính xác trong việc điều chỉnh góc quay mà còn đảm bảo động cơ hoạt động ổn định dưới các điều kiện tải khác nhau.
Các bước thực hiện điều khiển động cơ Servo bằng STM32F4
Phần cứng điều khiển
Để điều khiển động cơ RC Servo bằng STM32F4, cần thiết lập một sơ đồ kết nối chính xác. Chân PWM từ STM32F4 được nối trực tiếp vào chân tín hiệu điều khiển của động cơ Servo. Nguồn cấp ổn định 5V hoặc 6V đảm bảo động cơ hoạt động hiệu quả. Để tránh nhiễu tín hiệu, nối đất chung giữa STM32 và động cơ Servo là điều cần thiết.
Ngoài ra, cần có một mạch nguồn bổ sung để cung cấp năng lượng đủ lớn cho động cơ mà không làm ảnh hưởng đến hoạt động của vi điều khiển. Mạch này cũng cần tích hợp các linh kiện giảm nhiễu để bảo vệ tín hiệu điều khiển khỏi các tác động từ môi trường.
Cấu hình Timer để tạo tín hiệu PWM
Việc tạo tín hiệu PWM trên STM32F4 bắt đầu bằng cấu hình Timer Unit. Các thông số cần thiết lập bao gồm tần số tín hiệu (50Hz) và độ rộng xung PWM từ 1ms đến 2ms. STM32F4 cho phép cấu hình linh hoạt các thông số này, mang lại khả năng kiểm soát tốt hơn cho động cơ RC Servo.
Lập trình PWM thường sử dụng ngôn ngữ C hoặc C++, với sự hỗ trợ từ thư viện HAL. Ví dụ mã nguồn cơ bản cho thấy cách khởi tạo tín hiệu PWM và điều chỉnh độ rộng xung để đạt được góc quay mong muốn. Thông qua quá trình này, người dùng có thể tùy chỉnh hiệu suất động cơ để phù hợp với các ứng dụng khác nhau.
Lập trình tín hiệu PWM để điều khiển góc quay
Chuyển đổi góc quay thành tín hiệu PWM
Để điều khiển góc quay mong muốn của động cơ RC Servo, cần thực hiện việc chuyển đổi từ góc quay sang tín hiệu PWM tương ứng. Góc quay được tính toán dựa trên độ rộng xung (duty cycle) của tín hiệu PWM. Ví dụ, góc 0° thường tương ứng với xung rộng 1ms, góc 90° với xung 1.5ms, và góc 180° với xung 2ms.
Phương pháp này đòi hỏi sự chính xác trong tính toán để đảm bảo tín hiệu đầu ra tương thích với động cơ Servo. Ngoài ra, việc sử dụng các công cụ tính toán tự động hoặc các thư viện lập trình sẵn như Servo library trong STM32 giúp đơn giản hóa quy trình và giảm thiểu lỗi.
Ví dụ mã nguồn lập trình PWM
Một đoạn mã mẫu cho phép điều khiển góc quay từ 0° đến 180° bằng ngôn ngữ C thông qua thư viện HAL của STM32:
void SetServoAngle(TIM_HandleTypeDef *htim, uint32_t Channel, float angle) {
float pulse = (angle / 180.0) * (2.0 - 1.0) + 1.0; // Tính toán độ rộng xung (1ms - 2ms)
uint32_t dutyCycle = (pulse / 20.0) * __HAL_TIM_GET_AUTORELOAD(htim); // Quy đổi sang giá trị PWM
__HAL_TIM_SET_COMPARE(htim, Channel, dutyCycle); // Gửi tín hiệu PWM
}
Đoạn mã này minh họa cách chuyển đổi góc quay thành tín hiệu PWM và áp dụng nó trên bộ định thời STM32. Người dùng có thể mở rộng và tối ưu hóa mã nguồn để phù hợp với nhu cầu thực tế.
Cải tiến và tối ưu hóa hiệu suất điều khiển Servo
Tối ưu tín hiệu PWM
Tín hiệu PWM chất lượng cao là yếu tố cốt lõi để đảm bảo động cơ Servo hoạt động hiệu quả. Việc sử dụng tần số PWM cao, chẳng hạn 1kHz, giúp động cơ phản hồi nhanh hơn và giảm thiểu độ rung trong chuyển động. Đồng thời, các kỹ thuật như lọc tín hiệu hoặc giảm nhiễu từ mạch điện tử cũng giúp cải thiện chất lượng tín hiệu.
Thiết kế mạch điều khiển cũng đóng vai trò quan trọng trong việc tối ưu hóa hiệu suất. Mạch cần đảm bảo khả năng cấp nguồn ổn định, đủ dòng cho động cơ Servo hoạt động dưới tải cao mà không ảnh hưởng đến hệ thống tổng thể.
Ứng dụng PID Control trong điều khiển động cơ Servo
PID Control là một giải pháp mạnh mẽ để điều khiển động cơ Servo trong các hệ thống yêu cầu độ chính xác cao. Với vòng điều khiển kín, thuật toán PID điều chỉnh tín hiệu PWM dựa trên sai số giữa góc quay hiện tại và góc quay mong muốn, từ đó giảm thiểu sai lệch.
Ứng dụng PID trong STM32 dễ dàng được triển khai với sự hỗ trợ từ các thư viện nhúng. Kết hợp PID Control với STM32F4 không chỉ giúp cải thiện độ chính xác mà còn tăng hiệu quả hoạt động trong các môi trường phức tạp.
Các ứng dụng thực tế của hệ thống điều khiển Servo bằng STM32F4
Hệ thống nhúng và tự động hóa
Hệ thống điều khiển Servo dựa trên STM32F4 được ứng dụng rộng rãi trong các ngành công nghiệp hiện đại. Trong lĩnh vực robot, động cơ Servo đóng vai trò quan trọng trong việc điều khiển cánh tay robot, các khớp nối, hoặc hệ thống chuyển động linh hoạt. Với khả năng tạo tín hiệu PWM chính xác, STM32F4 là lựa chọn hàng đầu để đảm bảo tính ổn định và hiệu quả.
Ngoài ra, trong các thiết bị tự động hóa công nghiệp, động cơ Servo được sử dụng để điều chỉnh các chuyển động nhỏ, chẳng hạn như trong dây chuyền sản xuất hoặc hệ thống đóng gói. Các ứng dụng này đòi hỏi tín hiệu PWM chính xác và hiệu suất cao, điều mà STM32F4 hoàn toàn đáp ứng được.
Mô hình truyền động phức tạp
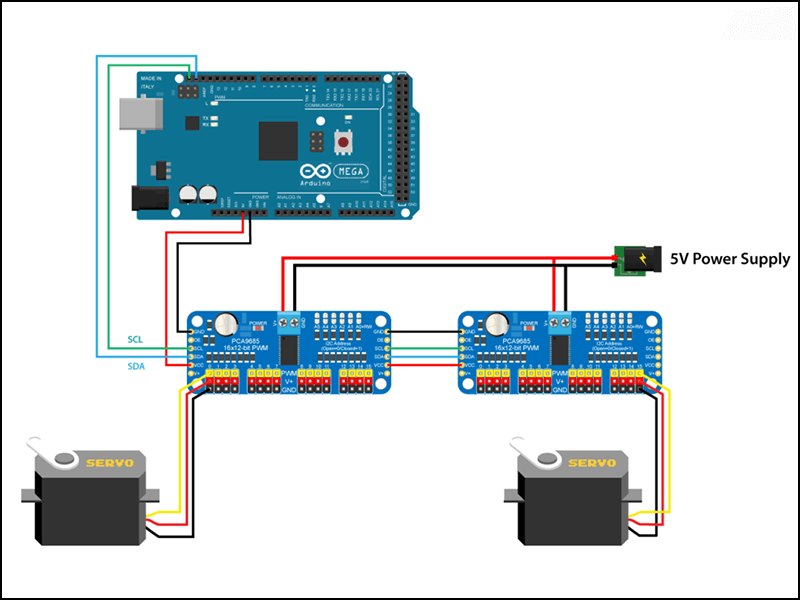
Trong các hệ thống phức tạp, chẳng hạn như điều khiển nhiều động cơ Servo cùng lúc, STM32F4 cung cấp khả năng tạo xung PWM đa kênh. Điều này cho phép người dùng điều khiển nhiều động cơ đồng thời, tối ưu hóa hiệu suất tổng thể của hệ thống.
Các ứng dụng như mô hình cơ khí, hệ thống truyền động tự động hoặc thiết bị đo lường công nghiệp đều có thể tận dụng khả năng linh hoạt và mạnh mẽ của STM32F4 để đạt được kết quả tối ưu.
Tổng kết
Việc điều khiển động cơ RC Servo bằng STM32F4 không chỉ là giải pháp hiệu quả mà còn mở ra cơ hội ứng dụng rộng rãi trong nhiều lĩnh vực. Từ việc cấu hình tín hiệu PWM, lập trình điều khiển, đến tối ưu hóa hệ thống, STM32F4 đã chứng minh vai trò quan trọng trong việc nâng cao hiệu suất và độ chính xác cho các hệ thống cơ khí và điện tử.
Đối với các kỹ sư, sinh viên kỹ thuật hoặc nhà đầu tư, việc nắm vững quy trình này không chỉ giúp giải quyết các thách thức kỹ thuật mà còn tạo nền tảng vững chắc cho các dự án trong tương lai. Hãy bắt đầu khám phá và tận dụng sức mạnh của STM32F4 ngay hôm nay để hiện thực hóa những ý tưởng sáng tạo.