Động Cơ Bước: Cấu Tạo, Nguyên Lý Hoạt Động, Phân loại, Cách Lựa Chọn

Bạn đã bao giờ tự hỏi làm thế nào mà những chiếc máy CNC có thể cắt những chi tiết kim loại tinh xảo đến vậy? Hay làm thế nào mà những chiếc máy in 3D có thể tạo ra những mô hình 3D phức tạp với độ chính xác cao? Câu trả lời là động cơ bước.
Động cơ bước là một loại động cơ điện có khả năng di chuyển với độ chính xác cao. Nó được sử dụng trong nhiều ứng dụng khác nhau, bao gồm chế tạo, in 3D, robot tự hành và y tế.
Nội dung
- 1. Khái niệm động cơ bước step motor là gì?
- 2. Phân loại động cơ bước
- 3. Cấu tạo động cơ bước
- 4. Setup thông số motor bước cho động cơ như thế nào mới đúng?
- 5 Nguyên lý hoạt động của động cơ bước
- 6. Ứng dụng của động cơ bước
- 7. Ưu nhược điểm của động cơ bước
- Động cơ bước và động cơ servo
- Lựa chọn động cơ bước phù hợp
- Bảo dưỡng động cơ bước
- Ứng dụng của động cơ bước trong công nghiệp 4.0
- Tương lai của động cơ bước
Khái niệm động cơ bước step motor là gì?
Động cơ bước (còn gọi là Step Motor hay Stepping Motor) chính là một thiết bị cơ điện, nó có tác dụng chuyển đổi năng lượng điện biến thành cơ năng. Ngoài ra, nó cũng là 1 động cơ điện không có chổi than, động cơ đồng bộ, có thể chia một vòng quay đầy đủ ra thành nhiều bước mở rộng.
Trục của động cơ khi đó sẽ quay qua 1 góc cố định của mỗi xung rời rạc. Khi một chuỗi xung hoạt động, nó sẽ được chuyển sang một góc nhất định. Góc mà trục động cơ bước tiến hành quay cho mỗi xung còn được gọi là góc bước, thường được tính bằng độ.
Động cơ bước còn gọi là Step Motor hay Stepping Motor
Nếu góc bước của động cơ càng nhỏ thì số bước trên mỗi vòng quay của nó lại càng lớn và độ chính xác đối với vị trí thu được cũng càng lớn. Các góc bước của động cơ có thể lớn tới 90 độ và nhỏ nhất đến 0,72 độ. Tuy nhiên, các góc bước thường được sử dụng nhiều nhất là 1,8 độ và 2,5 độ hoặc 7,5 độ và 15 độ.
Phân loại động cơ bước
Phân loại động cơ bước tùy theo số pha như sau:
- Loại 1: Động cơ bước 2 pha chính là loại động cơ bước bao gồm có 4 dây, động cơ bước 6 dây hoặc có khi là động cơ bước 8 dây.
- Loại 2: Động cơ bước 3 pha là chính là loại động cơ bước 3 dây hoặc có khi là động cơ bước 4 dây.
- Loại 3: Động cơ bước 5 pha chín là loại động cơ bước gồm có 5 dây.
Phân loại theo số lượng cực của động cơ bước như sau:
- Động cơ đơn cực: Dòng điện luôn luôn chạy qua cuộn dây chỉ theo cùng một hướng. Điều này cho phép động cơ sử dụng mạch điều khiển đơn giản, vì nó sẽ tạo ra mô men xoắn ít hơn là động cơ lưỡng cực.
- Động cơ lưỡng cực: Dòng điện của động cơ có thể chạy qua cuộn dây theo 1 trong 2 hướng. Trong khi đó, điều này lại đòi hỏi một mạch điều khiển phức tạp hơn là động cơ đơn cực, nó sẽ tạo ra nhiều mô men xoắn hơn nữa.
Phân loại động cơ bước tùy theo các Rotor như sau:
- Động cơ bước nam châm vĩnh cửu (tiếng Anh gọi là Permanent magnet stepper viết tắt là PM) chỉ sử dụng một nam châm vĩnh cửu bên trong rotor. Nó hoạt động dựa trên lực hút hoặc lực đẩy giữa bộ phận rotor PM và nam châm điện của stator.
- Động cơ bước có biến đổi điện trở (tiếng Anh gọi là Variable Reluctance Stepper Motor viết tắt VR) có một rotor sắt trơn. Nó hoạt động dựa trên nguyên tắc miễn cưỡng tối thiểu, điều này xảy ra với khe hở tối thiểu, do đó các điểm rotor của động cơ để bị hút về phía cực nam châm của phần stator.
- Động cơ bước đồng bộ lai (còn gọi là Hybrid Synchronous Stepper Motor viết tắt là HB. Đặt tên như vậy bởi vì chúng sử dụng kết hợp đồng thời các kỹ thuật nam châm vĩnh cửu (tức là PM) và biến đổi điện trở (tức là VR) để đạt được công suất tối đa trong một kích thước vô cùng nhỏ gọn.
Cấu tạo động cơ bước
Về cấu tạo, motor step (động cơ bước) thường bao gồm có các bộ phận chính đó là stato, roto chính là nam châm vĩnh cửu. Trong trường hợp động cơ biến từ trở lại chính là những khối răng được làm bằng vật liệu nhẹ có từ tính cao. Động cơ bước được điều khiển bởi một bộ điều khiển từ bên ngoài. Động cơ bước và bộ điều khiển sẽ được thiết kế sao cho chúng có thể giữ nguyên bất kỳ vị trí cố định nào và có thể quay đến được bất kỳ một vị trí nào.
Động cơ bước thường được sử dụng trong hệ thống điều khiển có vòng hở đơn giản, hoặc là vòng kín đều được. Tuy nhiên, khi sử dụng động cơ bước vào trong hệ điều khiển vòng hở khi máy móc bị quá tải thì tất cả các giá trị của động cơ đều bị mất đi và hệ thống cũng cần phải nhận diện lại.
Sơ đồ cấu tạo, motor step (động cơ bước)
Setup thông số motor bước cho động cơ như thế nào mới đúng?
Đầu tiên, bạn cần chỉnh thông số cho các trục X,Y,Z tương ứng với 3 thông số của $100, $101,$102 ở trên phần mềm glbr control 3.61.
Chỉnh dòng sao cho phù hợp với động cơ.
Chỉnh thông số như sau:
- Đầu tiên, hãy tìm hiểu xem loại động cơ của máy là loại bao nhiêu độ 1 bước, cái này có thể quan sát thấy trên thân động cơ. Thông thường, các loại động cơ bước hiện nay có thông số là 1.8 độ, tức là mỗi một xung cấp từ driver thì nó sẽ quay được 1.8 độ. Vậy muốn động cơ quay được 1 vòng 360 độ thì chúng ta cần bao nhiêu xung? Rất đơn giản, các bạn chỉ cần lấy 360/ 1.8 = 200.
- Trên driver A4988, động cơ còn có MS1 MS2 MS3, chính 3 jum cắm này bạn sẽ đánh dấu và bảng giá trị cho 3 jum như sau:
Đầu tiên là full step: Khi các bạn để trống cả 3 vị trí này (tức là không cắm jum nào) tức là để mức low (thấp) sẽ tương đương với chế độ full step. Chế độ này đòi hỏi muốn quay được 1 vòng thì bạn sẽ cần 360/ 1.8 = 200 xung
Tiếp đến là chế độ half step: Dựa theo chế độ này thì ta cần cắm jump vào vị trí MS1 để có thể kéo chân đó lên được mức cao. Chế độ này nghĩa là một xung driver cấp động cơ của máy sẽ quay được 1.8/ 2 = 0.9 độ. Vậy để động cơ quay được 1 vòng thì ta sẽ cần là 360/ 0.9 = 400 xung.
Thứ 3 là chế độ quarter step: Dòng chữ “eighth step”, “sixteenth step” được gọi tắt là các chế độ từ 1/4, 1/8 đến 1/16 bước, chúng sẽ setup và hoạt động tương tự. Ở các chế độ này, nếu bạn muốn động cơ quay được 1 vòng thì cần có số xung tương ứng cụ thể là 800, 1600, 3200,
Và trên phần mềm, các bạn hãy để ý 3 thông số là: $100,$101,$102,... theo đơn vị của nó là pulse/ mm đây chính là số xung cần cấp để cho trục X, Y, Z của động cơ chạy được 1mm.
Giả sử động cơ của máy là loại 1.8 độ, và các bạn để ở chế độ full step, sử dụng vitme có bước ren 8 (tức là quay 1 vòng sẽ tiến được 8mm) thì ta sẽ tiến hành setup như sau: full step có 1,8 độ, tức là bạn sẽ cần 200 xung để quay được 1 vòng, và để quay 1 vòng thì cần đi được 8mm. Theo đó, muốn đi được 1mm thì cần quay 200/ 8 = 25 vòng.
Nguyên lý hoạt động của động cơ bước
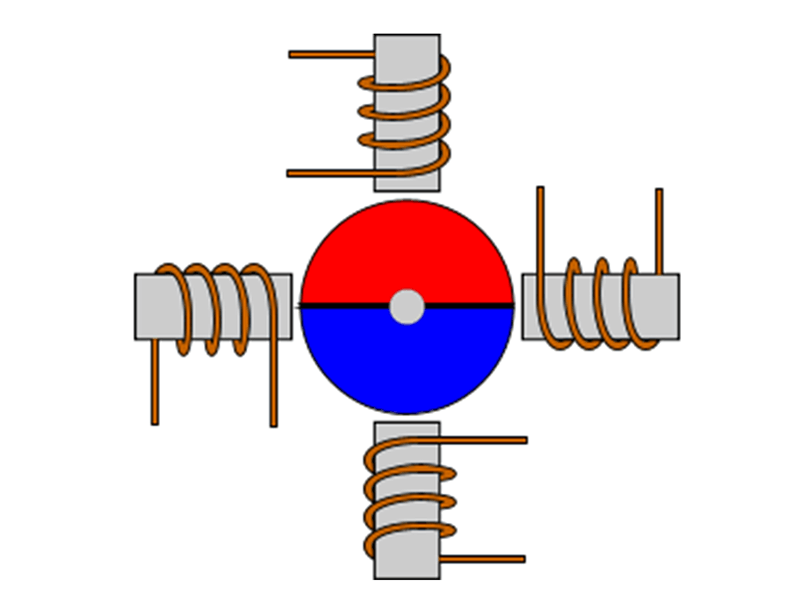
Nguyên lý hoạt động của motor bước nam châm vĩnh cửu có 2 cặp cuộn dây pha đó là: Ban đầu vị trí của stato và roto đang ở vị trí phase A. Khi cấp điện cho 2 cuộn dây pha B và D tương ứng trong 2 cuộn sẽ xuất hiện được cực tính.
Do cực tính của các cuộn dây pha và rôto trong động cơ ngược nhau dẫn đến roto sẽ chuyển động được đến vị trí phase B on. Khi cuộn dây pha B và D ngắt điện, còn cuộn dây A và B được cấp điện thì lúc này roto lại chuyển động đến vị trí phase C on.

Cực tính của các cuộn dây pha và rôto trong động cơ ngược nhau
Ứng dụng của động cơ bước
Các ứng dụng phổ biến của các loại động cơ bước hiện nay đó là:
Máy công nghiệp : Động cơ bước được sử dụng trong máy đo ô tô và máy công cụ thiết bị sản xuất tự động, máy CNC.
Bảo mật: sản phẩm giám sát mới cho ngành an ninh.
Y tế Động cơ bước được sử dụng bên trong máy quét y tế, máy lấy mẫu và cũng được tìm thấy bên trong chụp ảnh nha khoa kỹ thuật số, bơm chất lỏng, mặt nạ phòng độc và máy phân tích máu.
Điện tử tiêu dùng : Động cơ bước trong máy ảnh cho chức năng lấy nét và thu phóng camera kỹ thuật số tự động, máy in 3D.
Ưu nhược điểm của động cơ bước
Ưu điểm của động cơ bước:
Do cấu trúc bên trong mà động cơ bước không cần cảm biến để có thể phát hiện được vị trí động cơ. Khi động cơ di chuyển đến vị trí mong muốn bằng cách thực hiện các bước thì lúc này cách đơn giản chính là tiến hành đếm các bước này. Khi đó, bạn có thể biết được vị trí động cơ tại 1 thời điểm nhất định.
Ngoài ra, việc điều khiển động cơ bước cũng tương đối đơn giản. Động cơ bước không cần bộ trình điều khiển, cũng không cần tính toán cho phức tạp hoặc phải điều chỉnh để hoạt động cho đúng. Nhìn chung, cách điều khiển động cơ bước vô cùng dễ dàng.
Với chế độ microstepping, bạn có thể đạt được độ chính xác về vị trí cao nhất, có thể lên tới khoảng 0,007 °. Động cơ bước cung cấp mô men xoắn cho động cơ rất tốt ở tốc độ thấp, rất phù hợp cho việc giữ vị trí và nó cũng có tuổi thọ dài hơn.

Việc điều khiển động cơ bước cũng tương đối đơn giản
Nhược điểm của động cơ bước:
Động cơ bước có thể gặp phải vấn đề như lỡ bước khi mô men bị xoắn tải quá cao. Điều này còn gây tác động tiêu cực đến việc kiểm soát vị trí, vì không có cách nào tối ưu để biết được vị trí thực sự của động cơ.
Những động cơ bước luôn tiêu hao dòng điện tối đa, kể cả khi động cơ không hoạt động. Điều này khiến cho hiệu suất làm việc của máy kém hơn và có thể gây ra tình trạng quá nhiệt.
Động cơ bước và động cơ servo
Động cơ bước và động cơ servo là hai loại động cơ điện phổ biến, tuy nhiên chúng có những ưu điểm và nhược điểm riêng.
Ưu điểm của động cơ bước:
- Đơn giản, dễ điều khiển: Động cơ bước không cần cảm biến để phát hiện vị trí, do đó việc điều khiển động cơ bước tương đối đơn giản.
- Có thể hoạt động ở tốc độ thấp: Động cơ bước có mô men xoắn cao ở tốc độ thấp, do đó nó rất phù hợp cho các ứng dụng cần giữ vị trí hoặc di chuyển chậm.
- Tuổi thọ cao: Động cơ bước có tuổi thọ cao hơn so với động cơ servo.
Nhược điểm của động cơ bước:
- Có thể bị lỡ bước: Khi tải quá cao, động cơ bước có thể bị lỡ bước, dẫn đến mất vị trí.
- Không hiệu quả ở tốc độ cao: Động cơ bước có hiệu suất thấp ở tốc độ cao, do đó nó không phù hợp cho các ứng dụng cần di chuyển nhanh.
Ưu điểm của động cơ servo:
- Có độ chính xác cao: Động cơ servo có độ chính xác cao hơn so với động cơ bước.
- Có thể hoạt động ở tốc độ cao: Động cơ servo có thể hoạt động ở tốc độ cao hơn so với động cơ bước.
- Thích ứng với tải biến đổi: Động cơ servo có thể thích ứng với tải biến đổi tốt hơn so với động cơ bước.
Nhược điểm của động cơ servo:
- Phức tạp, khó điều khiển: Động cơ servo cần cảm biến để phát hiện vị trí, do đó việc điều khiển động cơ servo tương đối phức tạp.
- Tuổi thọ thấp hơn: Động cơ servo có tuổi thọ thấp hơn so với động cơ bước.
Lựa chọn động cơ bước phù hợp
Để lựa chọn động cơ bước phù hợp với ứng dụng, cần xem xét các yếu tố sau:
- Số bước: Số bước của động cơ bước càng nhiều thì độ phân giải càng cao.
- Góc bước: Góc bước của động cơ bước càng nhỏ thì độ chính xác càng cao.
- Công suất: Công suất của động cơ bước cần phù hợp với tải trọng của ứng dụng.
- Mô men xoắn: Mô men xoắn của động cơ bước cần phù hợp với tải trọng của ứng dụng.
- Tốc độ: Tốc độ của động cơ bước cần phù hợp với yêu cầu của ứng dụng.
- Kích thước: Kích thước của động cơ bước cần phù hợp với không gian lắp đặt.
Bảo dưỡng động cơ bước
Để đảm bảo hiệu suất và tuổi thọ của động cơ bước, cần thực hiện bảo dưỡng định kỳ theo các bước sau:
- Vệ sinh động cơ: Vệ sinh động cơ bằng cách thổi bụi hoặc dùng khăn mềm lau sạch.
- Kiểm tra các kết nối: Kiểm tra các kết nối điện và cơ khí xem có bị lỏng lẻo hay hư hỏng không.
- Thay thế các phụ tùng bị mòn: Nếu phát hiện các phụ tùng bị mòn, cần thay thế ngay để tránh ảnh hưởng đến hoạt động của động cơ.
Ứng dụng của động cơ bước trong công nghiệp 4.0
Động cơ bước là một trong những thành phần quan trọng của các hệ thống tự động hóa trong công nghiệp 4.0. Động cơ bước được ứng dụng trong nhiều lĩnh vực khác nhau, bao gồm:
- Chế tạo: Động cơ bước được sử dụng trong các máy CNC, máy in 3D, máy đóng gói,...
- Logistics: Động cơ bước được sử dụng trong các robot tự hành, băng tải,...
- Y tế: Động cơ bước được sử dụng trong các máy chụp X-quang, máy MRI,...
- Thương mại: Động cơ bước được sử dụng trong các máy bán hàng tự động, máy ATM,...
Tương lai của động cơ bước
Động cơ bước là một công nghệ đã có từ lâu đời, tuy nhiên nó vẫn đang tiếp tục được phát triển để đáp ứng nhu cầu ngày càng cao của các ứng dụng.
Một số xu hướng phát triển của động cơ bước trong tương lai bao gồm:
- Tăng độ chính xác: Độ chính xác của động cơ bước đang được cải thiện để đáp ứng yêu cầu của các ứng dụng đòi hỏi độ chính xác cao, chẳng hạn như máy in 3D và máy CNC.
- Tăng tốc độ: Tốc độ của động cơ bước cũng đang được cải thiện để đáp ứng yêu cầu của các ứng dụng đòi hỏi tốc độ cao, chẳng hạn như robot tự hành và băng tải.
- Giảm kích thước và trọng lượng: Kích thước và trọng lượng của động cơ bước đang được giảm thiểu để phù hợp với các ứng dụng đòi hỏi không gian lắp đặt nhỏ, chẳng hạn như máy bay không người lái và robot y tế.
- Tăng hiệu suất năng lượng: Hiệu suất năng lượng của động cơ bước cũng đang được cải thiện để giảm chi phí vận hành và bảo vệ môi trường.
Với những xu hướng phát triển này, động cơ bước sẽ ngày càng trở nên phổ biến và được ứng dụng rộng rãi trong nhiều lĩnh vực khác nhau.
Kết luận
Động cơ bước là một loại động cơ điện có nhiều ưu điểm, bao gồm đơn giản, dễ điều khiển, có thể hoạt động ở tốc độ thấp và có tuổi thọ cao. Động cơ bước được ứng dụng trong nhiều lĩnh vực khác nhau, bao gồm chế tạo, logistics, y tế và thương mại. Trong tương lai, động cơ bước sẽ tiếp tục được phát triển để đáp ứng nhu cầu ngày càng cao của các ứng dụng.
Nội Dung Có Thể Bạn Quan Tâm:
- Hướng Dẫn Điều Khiển Động Cơ Bước (Step Motor ) - Sơ Đồ Mạch Điều Khiển Động Cơ Bước
- Motor Điện 3 Pha Xuất Khẩu Châu Âu, Cấu Tạo, Ký Hiệu, Tiêu Chuẩn Thiết Kế
- Biến Tần Điều Khiển Tốc Độ Motor 3 Pha, Lợi Ích, Khái Niệm
- Động Cơ Parma, Thương Hiệu Bán Chạy Nhất Việt Nam, Quy Mô Tập Đoàn
- Cách Đấu Điện Motor 1 Pha, Đấu tụ, Đảo Chiều Tùy Ý
- Giá Motor 3 Pha Hitachi Toshiba Mitsubishi Nhật, ABB, Siemens Đức, Giá Quấn Lại Motor Toàn Quốc