Khám Phá Bí Mật Điều Khiển Động Cơ Servo Bằng Vi Điều Khiển: Tối Ưu Hiệu Suất Dễ Dàng

Điều khiển động cơ servo bằng vi điều khiển là một giải pháp hiệu quả trong tự động hóa và cơ điện tử. Với vi điều khiển như Arduino hoặc STM32, bạn có thể tận dụng tín hiệu PWM để kiểm soát chính xác góc quay và tốc độ của động cơ servo. Quá trình này không chỉ tăng tính linh hoạt mà còn tối ưu hóa hiệu suất trong các hệ thống tự động.
Hãy cùng khám phá cách lập trình, ứng dụng và tối ưu hóa việc điều khiển động cơ servo qua các công cụ và phương pháp hiện đại. Chúng tôi sẽ giúp bạn hiểu rõ hơn về cách sử dụng bộ đếm thời gian, tín hiệu điều chế và cảm biến vị trí để đạt hiệu quả cao nhất trong các dự án kỹ thuật.
Giới Thiệu
Động cơ servo và vi điều khiển là hai thành phần quan trọng trong các hệ thống tự động hóa hiện đại. Vi điều khiển đóng vai trò trung tâm trong việc điều khiển tín hiệu và tối ưu hóa hiệu suất của động cơ servo. Ứng dụng của chúng trải dài từ robot công nghiệp, cánh tay robot, đến các thiết bị thông minh trong hệ thống IoT.

Việc sử dụng tín hiệu PWM để điều chỉnh động cơ servo đã mở ra nhiều cơ hội trong lập trình nhúng và thiết kế hệ thống điều khiển chính xác. Bài viết này cung cấp cái nhìn toàn diện về nguyên lý, cấu trúc, và ứng dụng của các hệ thống điều khiển servo.
Nguyên Lý Hoạt Động Của Động Cơ Servo
Cấu Tạo Của Động Cơ Servo
Động cơ servo được cấu thành từ ba bộ phận chính: động cơ DC, biến trở, và mạch điều khiển. Động cơ DC tạo lực quay, trong khi biến trở đóng vai trò cảm biến vị trí, cung cấp phản hồi chính xác cho hệ thống. Mạch điều khiển xử lý tín hiệu đầu vào và quyết định góc quay hoặc tốc độ của động cơ.
Biến trở là thành phần quan trọng giúp hệ thống theo dõi vị trí của trục động cơ. Thông qua tín hiệu phản hồi, hệ thống điều chỉnh để đạt được độ chính xác cao. Điều này đặc biệt hữu ích trong các ứng dụng yêu cầu góc quay ổn định và tốc độ thay đổi linh hoạt.
Tín Hiệu PWM Trong Điều Khiển Servo
Tín hiệu PWM, hay điều chế độ rộng xung, là phương pháp điều khiển phổ biến trong hệ thống servo. Chu kỳ làm việc của tín hiệu PWM quyết định góc quay của động cơ. Tần số PWM cần được điều chỉnh chính xác để đảm bảo hiệu suất và giảm thiểu nhiễu tín hiệu.
Tín hiệu điều chế xung không chỉ điều chỉnh góc quay mà còn cải thiện độ mượt mà trong quá trình vận hành. Nhờ đó, hệ thống có thể đạt được hiệu suất ổn định, phù hợp cho các ứng dụng như cánh tay robot, xe tự hành, và máy in 3D.
Các Loại Vi Điều Khiển Dùng Để Điều Khiển Động Cơ Servo
Arduino Uno
Arduino Uno là lựa chọn phổ biến nhờ vào khả năng lập trình linh hoạt và thư viện Servo.h tích hợp. Thư viện này hỗ trợ điều khiển tín hiệu PWM một cách dễ dàng. Kỹ sư có thể sử dụng các hàm có sẵn để cài đặt góc quay hoặc tốc độ động cơ chỉ bằng vài dòng lệnh đơn giản.
Arduino Uno cũng hỗ trợ giao tiếp UART, giúp mở rộng khả năng kết nối với các cảm biến và module điều khiển servo khác. Đây là nền tảng lý tưởng cho sinh viên và kỹ sư mới bắt đầu làm quen với lập trình nhúng.
Vi Điều Khiển STM32
STM32 nổi bật với hiệu năng cao và khả năng xử lý tín hiệu phức tạp. Với bộ đếm thời gian, vi điều khiển này cung cấp tín hiệu PWM chính xác, phù hợp cho các ứng dụng yêu cầu độ ổn định cao. Lập trình STM32 thông qua CubeIDE cho phép kỹ sư tinh chỉnh các thông số như tần số xung và chu kỳ làm việc.
STM32 không chỉ hỗ trợ tín hiệu PWM mà còn tích hợp nhiều tính năng như giao tiếp SPI, I2C, giúp mở rộng ứng dụng trong các hệ thống tự động hóa phức tạp.
Vi Điều Khiển AVR
Vi điều khiển AVR có khả năng giao tiếp trực tiếp với servo thông qua cổng GPIO. Với các tính năng như bộ khuếch đại tín hiệu và mạch H-Bridge, AVR phù hợp cho các hệ thống yêu cầu điều khiển động cơ bước hoặc động cơ servo có công suất cao.
Sử dụng AVR, kỹ sư có thể tối ưu hóa chương trình nhúng để đạt được khả năng điều khiển chính xác, đảm bảo đáp ứng nhanh trong các ứng dụng thực tế.
Thiết Kế Mạch Điều Khiển Động Cơ Servo
Cấu Trúc Cơ Bản
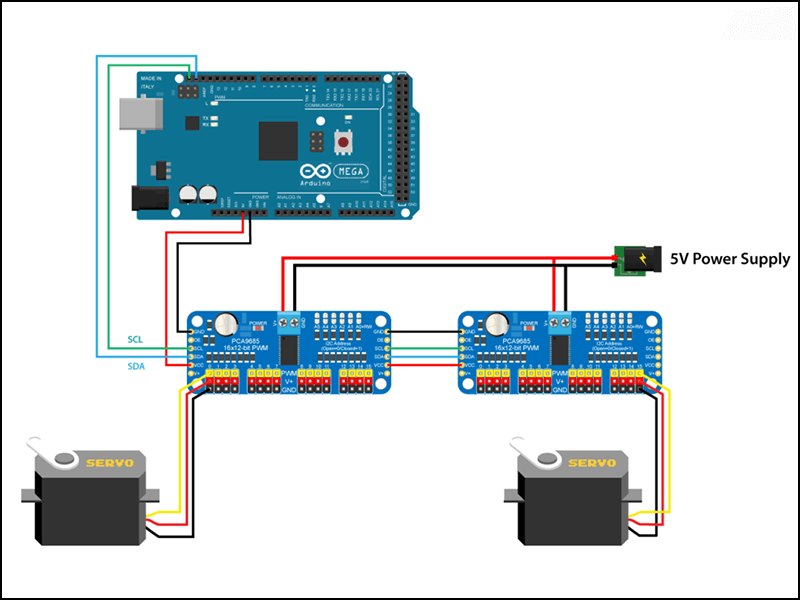
Một mạch điều khiển servo cơ bản bao gồm nguồn cấp điện, mạch điều chế tín hiệu PWM, và kết nối giữa vi điều khiển và động cơ servo. Nguồn cấp điện thường sử dụng 5V hoặc 6V, đảm bảo cung cấp đủ dòng cho động cơ hoạt động ổn định.
Mạch H-Bridge hoặc bộ khuếch đại tín hiệu đóng vai trò tăng cường tín hiệu điều khiển, giúp cải thiện hiệu suất động cơ. Kết nối tín hiệu giữa vi điều khiển và servo cần được bảo vệ chống nhiễu để đảm bảo tín hiệu PWM chính xác.
Ứng Dụng Cảm Biến Hồi Tiếp
Cảm biến hồi tiếp là giải pháp cải thiện độ chính xác trong các hệ thống điều khiển. Với sự hỗ trợ của cảm biến, hệ thống có thể theo dõi góc quay hoặc tốc độ động cơ theo thời gian thực. Bộ điều chỉnh PID được sử dụng để tối ưu hóa quá trình điều khiển, giúp giảm thiểu sai số và tăng độ ổn định.
Hệ thống cảm biến hồi tiếp đặc biệt hữu ích trong các ứng dụng yêu cầu độ chính xác cao như cánh tay robot và hệ thống điều khiển CNC. Điều này giúp tối ưu hóa quy trình sản xuất và nâng cao chất lượng sản phẩm.
Xem thêm: Tổng quan về motor điện
Hướng Dẫn Lập Trình PWM Cho Động Cơ Servo
Cấu Hình PWM Cho Arduino
Arduino là công cụ lý tưởng để lập trình tín hiệu PWM nhờ vào thư viện Servo.h. Thư viện này cung cấp các hàm đơn giản để điều khiển góc quay của động cơ servo. Ví dụ, bạn có thể khởi tạo một đối tượng servo, gắn nó vào một chân PWM và sử dụng hàm write() để cài đặt góc quay.
Mã nguồn mẫu:
#include <Servo.h>
Servo myServo;
void setup() {
myServo.attach(9); // Gắn servo vào chân số 9
}
void loop() {
myServo.write(90); // Quay góc 90 độ
delay(1000);
myServo.write(0); // Quay lại góc 0 độ
delay(1000);
}
Quá trình này phù hợp cho các ứng dụng cơ bản, nơi cần điều chỉnh góc quay nhanh và dễ dàng.
Lập Trình STM32 Điều Khiển Servo
STM32 mang lại khả năng điều khiển PWM với độ chính xác cao nhờ vào bộ đếm thời gian tích hợp. Trong môi trường CubeIDE, kỹ sư có thể cấu hình bộ đếm thời gian và tạo tín hiệu PWM thông qua HAL APIs. Việc cấu hình tần số và chu kỳ làm việc là bước quan trọng để đảm bảo tín hiệu PWM phù hợp với động cơ servo.
STM32 phù hợp với các ứng dụng phức tạp như robot công nghiệp, nơi đòi hỏi độ chính xác và tính ổn định cao. Tín hiệu PWM có thể được điều chỉnh dễ dàng để đáp ứng các yêu cầu cụ thể.
Tích Hợp Thư Viện Lập Trình Servo Cho AVR
Vi điều khiển AVR yêu cầu lập trình nhúng chi tiết hơn để tạo tín hiệu PWM. Thông qua việc sử dụng các thanh ghi bộ đếm thời gian, kỹ sư có thể phát triển chương trình tối ưu cho từng ứng dụng. AVR phù hợp cho các dự án cần tiết kiệm chi phí mà vẫn đảm bảo hiệu suất điều khiển động cơ.
Phân Tích Hiệu Suất Và Ứng Dụng
Các Yếu Tố Ảnh Hưởng Đến Hiệu Suất Servo
Hiệu suất của động cơ servo phụ thuộc vào nhiều yếu tố. Tần số PWM và độ rộng xung quyết định độ chính xác của góc quay. Tải trọng động cơ cũng là một yếu tố quan trọng. Nếu tải quá lớn, động cơ có thể bị quá tải hoặc mất tính ổn định.
Nhiễu tín hiệu là một vấn đề cần được giải quyết trong các hệ thống điều khiển. Việc sử dụng cáp che chắn và mạch lọc tín hiệu có thể giúp giảm thiểu ảnh hưởng từ môi trường.
Ứng Dụng Thực Tiễn
Động cơ servo được ứng dụng rộng rãi trong các ngành công nghiệp. Trong robot công nghiệp và cánh tay robot, động cơ servo đảm bảo chuyển động chính xác và lặp lại. Hệ thống xe tự hành sử dụng servo để điều chỉnh góc lái và tốc độ.
Trong các ngành sản xuất, máy CNC và máy in 3D sử dụng động cơ servo để cải thiện độ chính xác của sản phẩm. Các thiết bị này giúp tăng hiệu quả sản xuất và giảm chi phí vận hành.
Xử Lý Các Lỗi Thường Gặp
Góc Quay Sai Lệch Do Tín Hiệu PWM Không Chính Xác
Khi tín hiệu PWM không ổn định, góc quay của động cơ servo có thể bị sai lệch. Điều này thường xảy ra do nhiễu tín hiệu hoặc cấu hình tần số PWM không phù hợp. Kỹ sư cần kiểm tra lại mạch điều khiển và đảm bảo rằng tín hiệu PWM được phát đúng thông số.
Servo Bị Quá Tải Hoặc Nhiệt Độ Tăng Cao
Quá tải là một trong những nguyên nhân chính dẫn đến hỏng hóc động cơ servo. Để giải quyết, cần chọn động cơ có tải trọng phù hợp và sử dụng các cảm biến để giám sát nhiệt độ trong quá trình vận hành.
Lỗi Kết Nối Giữa Vi Điều Khiển Và Động Cơ Servo
Lỗi kết nối có thể gây mất tín hiệu hoặc làm giảm hiệu suất của hệ thống. Kỹ sư nên kiểm tra các điểm nối, đảm bảo không có sự lỏng lẻo hoặc đứt mạch. Sử dụng đầu nối chất lượng cao và hàn mạch đúng cách là giải pháp hiệu quả.
Kết Luận
Điều khiển động cơ servo bằng vi điều khiển là một kỹ thuật thiết yếu trong ngành kỹ thuật hiện đại. Từ việc cấu hình tín hiệu PWM, lập trình nhúng đến thiết kế mạch điều khiển, tất cả đều đóng vai trò quan trọng trong việc tối ưu hóa hệ thống.
Bằng cách áp dụng các kiến thức trên, kỹ sư có thể xây dựng các hệ thống tự động hóa với hiệu suất cao, đáng tin cậy và tiết kiệm chi phí. Đây là nền tảng cho sự phát triển của công nghệ trong tương lai.