Khám Phá Cách Điều Khiển Động Cơ Bước Với ULN2003: Đơn Giản Mà Hiệu Quả

Điều khiển động cơ bước bằng module ULN2003 không chỉ là một kỹ thuật đơn giản mà còn là cơ hội để khai phá tiềm năng sáng tạo trong lĩnh vực tự động hóa. Với Arduino Uno R3, động cơ bước 28BYJ-48 và thư viện Stepper, bạn có thể hiện thực hóa các ý tưởng điều khiển chính xác, từ việc lập trình cơ bản đến tối ưu hóa hiệu suất. Bài viết này sẽ đồng hành cùng bạn, từ sơ đồ đấu nối đến những ứng dụng thực tiễn, giúp bạn làm chủ công nghệ một cách dễ dàng và hiệu quả.
Tổng quan về điều khiển động cơ bước ULN2003
Động cơ bước 28BYJ-48 là loại động cơ phổ biến trong các ứng dụng tự động hóa nhờ thiết kế nhỏ gọn và khả năng điều khiển chính xác. Với nguồn cấp 5V, động cơ này có thể hoạt động hiệu quả trong các hệ thống yêu cầu điều khiển chuyển động theo từng bước. Tỷ số truyền 1/64 cho phép đạt được 4096 bước cho mỗi vòng quay đầy đủ, mang lại độ chính xác cao, thích hợp cho các ứng dụng như robot, thiết bị đo lường, và tự động hóa gia đình.

Module điều khiển động cơ bước ULN2003 đóng vai trò trung gian trong việc khuếch đại tín hiệu từ bo mạch Arduino Uno R3 đến động cơ bước. ULN2003 sử dụng mạch IC driver để điều chỉnh dòng điện và cung cấp tín hiệu PWM chính xác, đảm bảo động cơ hoạt động mượt mà và ổn định. Khi kết hợp với Arduino và thư viện Stepper, module này tạo nên hệ thống điều khiển linh hoạt và dễ sử dụng.
Các thành phần cần thiết
Phần cứng
Bo mạch Arduino Uno R3 là nền tảng quan trọng trong việc lập trình và điều khiển động cơ bước. Đây là một board vi điều khiển mạnh mẽ, hỗ trợ các giao tiếp tín hiệu đầu vào và đầu ra thông qua các chân I/O số. Ngoài ra, Arduino Uno còn cung cấp nguồn 5V ổn định cho các linh kiện như module ULN2003 và động cơ bước 28BYJ-48.
Động cơ bước 28BYJ-48 với thiết kế 5V cung cấp khả năng quay phân đoạn nhỏ, hỗ trợ kiểm soát từng bước quay với độ chính xác cao. Module ULN2003 kết nối trực tiếp với động cơ và Arduino thông qua các chân tín hiệu IN1 đến IN4, giúp chuyển đổi tín hiệu logic thành dòng điện điều khiển. Dây nối và nguồn cấp 5V là các thành phần không thể thiếu để đảm bảo kết nối hoàn chỉnh và cung cấp năng lượng cho toàn hệ thống.
Xem thêm: Tổng quan về motor điện
Phần mềm
Arduino IDE là môi trường lập trình mở, giúp người dùng dễ dàng viết và tải mã điều khiển lên Arduino Uno R3. Thư viện Stepper là một công cụ mạnh mẽ, hỗ trợ các hàm điều khiển động cơ bước như bước quay, tốc độ, và hướng quay. Công cụ Serial Monitor tích hợp trong Arduino IDE cho phép giám sát dữ liệu và kiểm tra quá trình điều khiển, đảm bảo tính chính xác trong khi thực hiện các chương trình thử nghiệm.
Nguyên lý điều khiển động cơ bước
Động cơ bước hoạt động dựa trên nguyên lý tạo xung điều khiển từng bước. Mỗi xung tín hiệu PWM do Arduino phát ra thông qua module ULN2003 sẽ làm quay động cơ một góc nhất định. Kết hợp tỷ số truyền 1/64, hệ thống có thể đạt 4096 bước mỗi vòng quay đầy đủ, mang lại khả năng kiểm soát mượt mà trong các ứng dụng yêu cầu độ chính xác cao.
Mạch logic của module ULN2003 đóng vai trò quan trọng trong việc tăng cường dòng điện đến động cơ. IC driver trong ULN2003 nhận tín hiệu từ Arduino và khuếch đại để đáp ứng nhu cầu dòng điện của động cơ. Điều này đảm bảo các bước quay được thực hiện đều đặn và ổn định, kể cả trong các môi trường tải nặng hoặc vận hành liên tục.
4. Sơ đồ đấu nối và hướng dẫn kết nối
Sơ đồ đấu nối
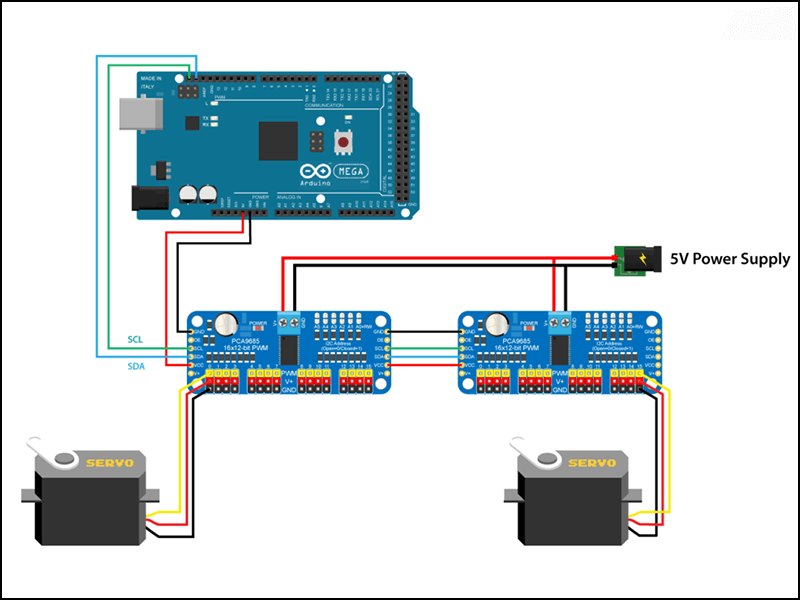
Sơ đồ đấu nối cơ bản bao gồm các kết nối chính giữa Arduino Uno R3, module ULN2003, và động cơ bước 28BYJ-48. Các chân tín hiệu IN1, IN2, IN3, IN4 của ULN2003 được nối với các chân kỹ thuật số trên Arduino, thường là chân 8, 9, 10 và 11. Nguồn 5V và GND từ Arduino được kết nối trực tiếp đến module ULN2003 để cung cấp năng lượng và tín hiệu logic. Động cơ bước được nối qua jack cắm 4 dây đến ULN2003.
Hướng dẫn kết nối
Đảm bảo dây nối tín hiệu và nguồn cấp được kết nối chặt chẽ để tránh tình trạng mất tín hiệu hoặc không đủ dòng điện cho động cơ. Khi nguồn cấp và kết nối hoàn chỉnh, đèn LED trên module ULN2003 sẽ sáng, báo hiệu tín hiệu đầu vào hoạt động bình thường. Kiểm tra lại toàn bộ hệ thống trước khi lập trình và chạy thử nghiệm để đảm bảo tính ổn định và an toàn cho thiết bị.
Lập trình điều khiển động cơ bước
Cài đặt môi trường
Trước tiên, tải và cài đặt Arduino IDE từ trang chủ Arduino để thiết lập môi trường lập trình. Đảm bảo bo mạch Arduino Uno R3 được kết nối đúng cách với máy tính qua cáp USB. Tiếp theo, cài đặt thư viện Stepper bằng cách sử dụng công cụ Library Manager trong Arduino IDE. Thư viện này cung cấp các hàm hỗ trợ việc điều khiển động cơ bước một cách dễ dàng, từ cấu hình số bước đến thiết lập tốc độ quay.
Sau khi cài đặt thư viện, hãy tạo một dự án mới để viết mã nguồn điều khiển động cơ bước. Lập trình Arduino không yêu cầu kinh nghiệm cao, các bước cấu hình và mã nguồn cơ bản đều được hướng dẫn rõ ràng và thân thiện với người dùng mới.

Mã nguồn cơ bản
Dưới đây là mã nguồn cơ bản để điều khiển động cơ bước 28BYJ-48 bằng module ULN2003:
#include <Stepper.h>
const int stepsPerRevolution = 4096; // Số bước cho một vòng quay đầy đủ
Stepper myStepper(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
Serial.begin(9600);
myStepper.setSpeed(10); // Đặt tốc độ quay (vòng/phút)
Serial.println("Bắt đầu điều khiển động cơ bước");
}
void loop() {
Serial.println("Quay theo chiều kim đồng hồ");
myStepper.step(stepsPerRevolution); // Quay một vòng đầy đủ
delay(1000);
Serial.println("Quay ngược chiều kim đồng hồ");
myStepper.step(-stepsPerRevolution); // Quay ngược một vòng đầy đủ
delay(1000);
}
Giải thích mã nguồn
Mã nguồn trên sử dụng thư viện Stepper để khai báo và khởi tạo đối tượng điều khiển động cơ. Hàm myStepper.setSpeed() thiết lập tốc độ quay cho động cơ, giúp kiểm soát chuyển động mượt mà. Trong vòng lặp chính, các lệnh myStepper.step() tạo tín hiệu điều khiển động cơ quay theo chiều kim đồng hồ hoặc ngược chiều kim đồng hồ với số bước được xác định. Serial Monitor giúp người dùng theo dõi trạng thái điều khiển và kiểm tra kết nối trong quá trình thực thi.
Ứng dụng và tối ưu hóa
Ứng dụng
Điều khiển động cơ bước có nhiều ứng dụng thực tiễn trong các lĩnh vực công nghiệp và dân dụng. Trong chế tạo robot, động cơ bước được sử dụng để điều khiển chuyển động của bánh xe hoặc cánh tay robot. Trong tự động hóa gia đình, động cơ bước giúp vận hành các thiết bị như rèm cửa tự động, khóa thông minh, hoặc các hệ thống điều chỉnh ánh sáng.
Ngoài ra, trong thiết bị đo lường, động cơ bước được sử dụng để điều chỉnh cảm biến theo góc hoặc vị trí mong muốn. Tính chính xác cao của động cơ bước với module ULN2003 cho phép các hệ thống này hoạt động ổn định trong thời gian dài.
Tối ưu hóa hệ thống
Để tối ưu hóa hiệu suất của hệ thống, cần đảm bảo tín hiệu PWM được điều chỉnh chính xác. Tốc độ quay và số bước có thể được tinh chỉnh thông qua phần mềm để phù hợp với từng ứng dụng cụ thể. Hiệu suất của module ULN2003 cũng nên được giám sát để đảm bảo dòng điện cung cấp đủ cho động cơ, đặc biệt trong các môi trường tải nặng.
Điều chỉnh thời gian trễ giữa các bước quay cũng là một yếu tố quan trọng để đảm bảo động cơ hoạt động mượt mà, không bị rung lắc hoặc mất bước. Những cải tiến nhỏ này giúp hệ thống vận hành hiệu quả hơn và kéo dài tuổi thọ cho các linh kiện.
Hướng dẫn khắc phục lỗi
Lỗi không quay
Nếu động cơ không quay, kiểm tra các kết nối dây và đảm bảo rằng module ULN2003 được cấp nguồn đúng cách từ Arduino. Kiểm tra các chân tín hiệu IN1 đến IN4 của ULN2003 và xác nhận rằng chúng đã được nối chính xác với Arduino. Nếu động cơ vẫn không hoạt động, có thể IC driver của module đã bị hỏng và cần thay thế.
Lỗi không đủ nguồn cấp
Nguồn cấp 5V từ Arduino có thể không đáp ứng được nhu cầu dòng điện của động cơ trong một số trường hợp. Sử dụng nguồn cấp độc lập 5V có thể giải quyết vấn đề này. Đảm bảo rằng nguồn cấp đủ công suất và được kết nối đúng cách để tránh làm hỏng module ULN2003 hoặc động cơ.
Kết luận
Việc điều khiển động cơ bước với module ULN2003 và Arduino Uno R3 mang lại sự linh hoạt, hiệu quả và chi phí thấp cho các dự án kỹ thuật và công nghiệp. Với thiết kế nhỏ gọn, khả năng lập trình dễ dàng, và ứng dụng đa dạng, hệ thống này là giải pháp tối ưu cho sinh viên kỹ thuật, kỹ sư bảo trì, và các nhà đầu tư đang tìm kiếm công nghệ điều khiển chính xác.
Dù bạn là người mới bắt đầu hay chuyên gia trong lĩnh vực tự động hóa, việc khám phá và làm chủ hệ thống điều khiển động cơ bước ULN2003 sẽ mở ra nhiều cơ hội sáng tạo và cải tiến. Hãy bắt đầu ngay hôm nay để tận dụng tối đa tiềm năng của công nghệ này trong các ứng dụng thực tế.