Khám phá cách điều khiển động cơ bước chính xác và hiệu quả với module L298N!

Điều khiển động cơ bước hai pha bằng module L298N là một giải pháp phổ biến trong các ứng dụng tự động hóa và công nghiệp. Hệ thống này không chỉ đảm bảo hiệu suất hoạt động ổn định mà còn đơn giản hóa việc lập trình và triển khai trong các dự án thực tiễn. Với khả năng điều chỉnh tốc độ và hướng quay thông qua PWM, module L298N kết hợp với vi điều khiển như Arduino đã trở thành lựa chọn lý tưởng cho nhiều kỹ sư và nhà phát triển.
Các thành phần chính trong hệ thống
Module L298N
Module L298N được thiết kế dựa trên IC L298, một mạch cầu H kép có khả năng điều khiển hai động cơ DC hoặc một động cơ bước hai pha. Module này được tích hợp các chân điều khiển như IN1, IN2, IN3, IN4 và các chân ENA, ENB để nhận tín hiệu PWM. Điện áp cấp cho module có thể dao động từ 5V đến 35V, đảm bảo khả năng hoạt động với nhiều loại động cơ khác nhau. Ngoài ra, L298N còn tích hợp mạch bảo vệ nhiệt, giúp duy trì độ an toàn khi dòng tải tăng cao.
Trong hệ thống điều khiển động cơ bước, module L298N hoạt động như một cầu nối, giúp đổi chiều dòng điện để điều khiển hướng quay và tốc độ động cơ. Đây là thành phần quan trọng trong các thiết bị như robot tự hành, hệ thống IoT và các dây chuyền sản xuất tự động.
Động cơ bước
Động cơ bước hai pha hoạt động dựa trên nguyên lý xung tuần tự, mỗi xung điện sẽ tương ứng với một bước di chuyển của động cơ. Loại động cơ phổ biến nhất trong ứng dụng này là động cơ bước 4 dây, hay còn gọi là động cơ bước bipolar. Với đặc điểm này, động cơ có thể thực hiện các chuyển động chính xác theo từng góc quay cụ thể, phù hợp với các ứng dụng yêu cầu độ chính xác cao.
Động cơ bước thường được sử dụng trong các hệ thống như máy in 3D, thiết bị điều khiển cơ khí, và các giải pháp tự động hóa công nghiệp. Việc điều khiển động cơ bước bằng module L298N cho phép người dùng tối ưu hóa khả năng vận hành và tiết kiệm chi phí khi triển khai các dự án thực tế.
Vi điều khiển
Vi điều khiển như Arduino Uno hoặc Arduino Nano đóng vai trò trung tâm trong hệ thống điều khiển động cơ bước. Các chân digital của Arduino sẽ được kết nối với các chân IN1-IN4 của module L298N để phát tín hiệu điều khiển. Thông qua thư viện Stepper.h, người dùng có thể lập trình các chuyển động cụ thể cho động cơ mà không cần phải tính toán quá nhiều về xung và tín hiệu.
Arduino không chỉ giúp đơn giản hóa việc lập trình mà còn hỗ trợ tích hợp các cảm biến khác vào hệ thống, tạo điều kiện để mở rộng chức năng. Với khả năng kết nối linh hoạt và chi phí thấp, Arduino là một lựa chọn không thể thiếu trong các hệ thống điều khiển hiện đại.
Nguyên lý điều khiển động cơ bước bằng L298
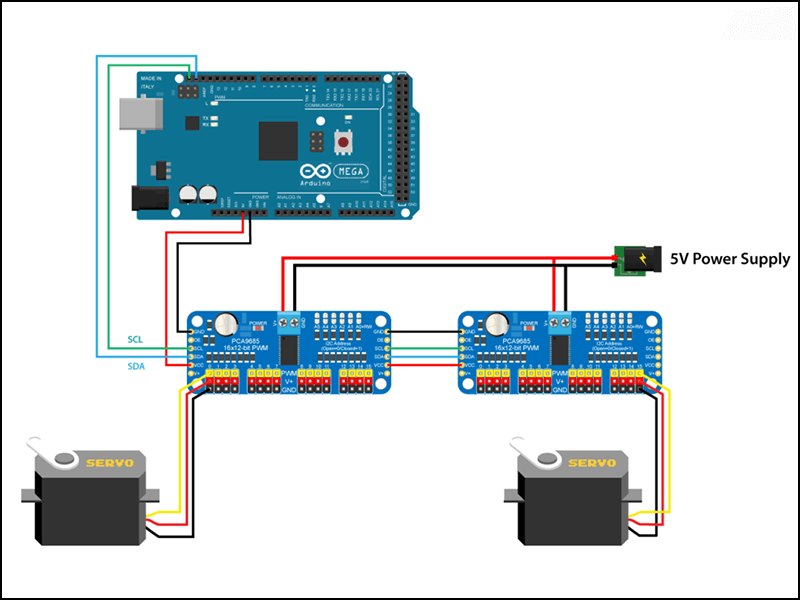
Cấu hình mạch điều khiển
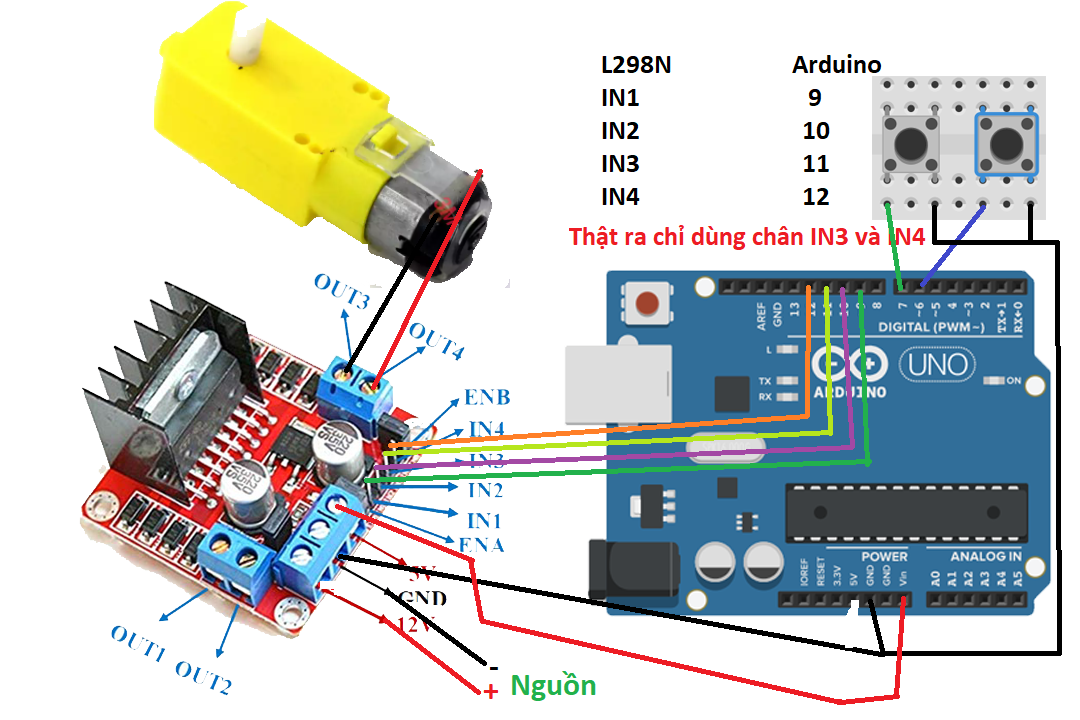
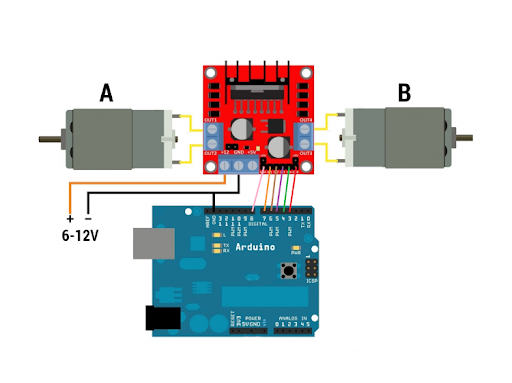
Hệ thống điều khiển động cơ bước bằng module L298N yêu cầu kết nối phần cứng chính xác để đảm bảo tín hiệu hoạt động ổn định. Các chân IN1, IN2, IN3, IN4 được nối trực tiếp với các chân digital của Arduino. Tín hiệu PWM được gửi đến các chân ENA và ENB để điều chỉnh tốc độ quay của động cơ. Nguồn điện từ 5V đến 35V sẽ được cấp cho module và động cơ, đảm bảo khả năng vận hành liên tục.
Xem thêm: Tổng quan về motor điện
Khi thiết kế mạch, cần chú ý đến kết nối chân nối đất (GND) để tránh hiện tượng nhiễu tín hiệu. Sơ đồ mạch cũng nên bao gồm các linh kiện bảo vệ như diode chống ngược dòng hoặc tụ điện ổn định để tăng tuổi thọ cho module và động cơ.
Nguyên lý hoạt động
Module L298N sử dụng mạch cầu H để đổi chiều dòng điện qua các cuộn dây của động cơ bước. Khi tín hiệu HIGH/LOW được gửi đến các chân IN, động cơ sẽ quay theo một chiều cụ thể. Tín hiệu PWM sẽ quyết định tốc độ quay của động cơ, trong khi sự thay đổi tuần tự của các xung trên các chân IN sẽ điều khiển chuyển động chính xác của động cơ.
Tín hiệu xung đồng bộ trên các chân IN1-IN4 giúp động cơ bước di chuyển theo từng vị trí cụ thể, đảm bảo độ chính xác cao trong các ứng dụng cần điều khiển chuyển động tinh vi. Đây là yếu tố quyết định đến hiệu suất của hệ thống, đặc biệt trong các thiết bị như robot tự hành hay máy móc công nghiệp.
Lập trình Arduino điều khiển động cơ bước
Thư viện Stepper.h
Thư viện Stepper.h là công cụ hữu ích giúp lập trình điều khiển động cơ bước trở nên đơn giản và hiệu quả. Người dùng có thể khai báo số bước mỗi vòng và cấu hình chân tín hiệu dễ dàng. Với hàm step(), bạn có thể thực hiện các chuyển động quay chính xác, linh hoạt theo chiều kim đồng hồ hoặc ngược chiều.
Ví dụ dưới đây minh họa cách lập trình động cơ bước sử dụng thư viện Stepper.h:
#include <Stepper.h>
const int stepsPerRevolution = 200; // Số bước mỗi vòng
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
myStepper.setSpeed(60); // Tốc độ 60 RPM
}
void loop() {
myStepper.step(stepsPerRevolution); // Quay theo chiều kim đồng hồ
delay(1000);
myStepper.step(-stepsPerRevolution); // Quay ngược chiều kim đồng hồ
delay(1000);
}
Lập trình bằng Stepper.h không chỉ giúp giảm thiểu sai sót mà còn tăng tốc độ triển khai các dự án, đặc biệt trong lĩnh vực robot và tự động hóa công nghiệp.
Điều chỉnh tốc độ và tối ưu hóa hệ thống
PWM đóng vai trò quyết định trong việc điều chỉnh tốc độ động cơ bước. Để tăng tốc hoặc giảm tốc độ, bạn có thể thay đổi độ rộng xung hoặc tần số PWM. Ngoài ra, việc kiểm tra kỹ lưỡng kết nối các chân IN1-IN4, sử dụng nguồn cấp điện ổn định và trang bị mạch tản nhiệt cho module L298N là những cách tối ưu hóa hiệu suất hệ thống.
Đối với các hệ thống hoạt động liên tục, việc duy trì nhiệt độ ổn định cho module và động cơ là rất quan trọng. Hãy đảm bảo rằng module L298N không vượt quá giới hạn dòng tải 2A, điều này giúp tăng tuổi thọ cho cả hệ thống.
Ứng dụng thực tiễn
Robot tự hành
Module L298N là lựa chọn phổ biến trong việc điều khiển động cơ cho các robot tự hành. Tín hiệu từ Arduino kết hợp với PWM cho phép điều chỉnh linh hoạt tốc độ và hướng di chuyển của robot. Robot tự hành sử dụng động cơ bước thường có độ chính xác cao, phù hợp với các nhiệm vụ như vận chuyển, điều hướng hoặc các hệ thống tìm đường thông minh.
Hệ thống tự động hóa
Trong các dây chuyền sản xuất, động cơ bước đóng vai trò quan trọng trong việc đảm bảo độ chính xác khi thực hiện các thao tác lặp đi lặp lại. Module L298N hỗ trợ điều khiển động cơ với tốc độ cao và chính xác, đáp ứng các yêu cầu khắt khe trong công nghiệp. Ngoài ra, hệ thống này còn được ứng dụng rộng rãi trong các thiết bị IoT, nơi mà khả năng điều khiển từ xa và tự động hóa là ưu tiên hàng đầu.
Giáo dục và nghiên cứu
Hệ thống điều khiển động cơ bước bằng Arduino và module L298N cũng rất hữu ích trong môi trường giáo dục. Sinh viên kỹ thuật có thể dễ dàng học cách thiết kế, lập trình và triển khai các dự án thực tế như robot mini, mô hình tự động hóa, hoặc máy in 3D. Đây là nền tảng tốt để xây dựng kỹ năng và kiến thức cho các kỹ sư tương lai.
Lưu ý quan trọng khi sử dụng module L298N
Kiểm tra dòng tải tối đa
Module L298N có giới hạn dòng tải 2A trên mỗi kênh. Khi sử dụng, hãy đảm bảo rằng dòng tải không vượt quá ngưỡng này để bảo vệ IC và tránh hiện tượng quá nhiệt.
Đảm bảo nguồn điện ổn định
Điện áp đầu vào nên nằm trong khoảng 5V-35V để đảm bảo hệ thống hoạt động ổn định. Ngoài ra, cần kiểm tra kết nối nguồn và đất (GND) để tránh hiện tượng nhiễu tín hiệu.
Bảo vệ module
Trong các ứng dụng yêu cầu dòng tải lớn hoặc hoạt động liên tục, cần trang bị thêm mạch bảo vệ nhiệt hoặc tản nhiệt để duy trì hiệu suất và tuổi thọ cho module.
Kết luận
Module L298N và Arduino là sự kết hợp hoàn hảo để điều khiển động cơ bước trong các ứng dụng tự động hóa và công nghiệp. Với khả năng điều chỉnh tốc độ, hướng quay và sự linh hoạt trong lập trình, hệ thống này không chỉ đáp ứng nhu cầu sản xuất mà còn phù hợp cho giáo dục, nghiên cứu và các dự án cá nhân. Việc áp dụng module L298N trong robot tự hành, hệ thống IoT và dây chuyền sản xuất đã chứng minh tính hiệu quả và tiềm năng to lớn của giải pháp này trong ngành công nghiệp hiện đại.