Khám Phá Cách Điều Khiển Động Cơ Bước Chính Xác Bằng Biến Trở Và Arduino

Điều khiển động cơ bước bằng biến trở là một giải pháp linh hoạt trong hệ thống tự động hóa, từ các ứng dụng công nghiệp đến đời sống hàng ngày. Với sự hỗ trợ của Arduino, vi điều khiển và các thành phần điện tử liên quan, việc kiểm soát tốc độ, vị trí của động cơ trở nên chính xác và dễ dàng hơn. Bài viết này sẽ cung cấp cái nhìn chi tiết và các bước thực hiện để thiết kế một hệ thống điều khiển động cơ bước hiệu quả.
Khái niệm cơ bản về động cơ bước và biến trở
Động cơ bước
Động cơ bước là loại động cơ quay theo từng bước góc cụ thể, cho phép kiểm soát chính xác vị trí và tốc độ của trục quay. Trong các hệ thống tự động hóa, động cơ bước đóng vai trò quan trọng khi yêu cầu độ chính xác cao.
- Các thông số kỹ thuật cơ bản của động cơ bước bao gồm:
- Tốc độ quay: xác định tốc độ của trục động cơ.
- Vị trí góc: mỗi bước di chuyển ứng với một góc cụ thể.
- Số bước: thể hiện tổng số bước để quay trọn một vòng.
- Phân loại động cơ bước:
- Động cơ đơn cực, thường sử dụng trong các ứng dụng cơ bản với cấu trúc đơn giản.
- Động cơ lưỡng cực, yêu cầu mạch điều khiển phức tạp hơn nhưng cung cấp hiệu suất cao.
Biến trở
Biến trở là linh kiện điện tử cho phép thay đổi giá trị điện trở, được sử dụng để điều chỉnh tín hiệu trong mạch điện. Trong điều khiển động cơ bước, biến trở đóng vai trò như một thiết bị đầu vào giúp kiểm soát tốc độ và hướng quay.
- Các loại biến trở phổ biến:
- Biến trở cơ học: hoạt động bằng cách xoay núm điều chỉnh để thay đổi giá trị điện trở.
- Biến trở điện tử: sử dụng tín hiệu điện tử để thay đổi giá trị, thường được tích hợp trong các hệ thống tự động hóa hiện đại.
- Vai trò chính:
- Thay đổi tín hiệu analog đầu vào, giúp kiểm soát động cơ thông qua Arduino.
- Tăng giảm tốc độ hoặc thay đổi hướng quay của động cơ dựa trên giá trị điều chỉnh.
Thành phần hệ thống điều khiển
Vi điều khiển và Arduino
Arduino là một bảng mạch điều khiển trung tâm phổ biến, được sử dụng rộng rãi trong các dự án điều khiển động cơ bước. Vi điều khiển trên Arduino đọc tín hiệu từ biến trở và xử lý để điều chỉnh động cơ.
- Các thành phần chính của Arduino trong hệ thống:
- Cổng vào analog: đọc tín hiệu biến trở.
- Chương trình Arduino IDE: lập trình điều khiển thông qua các thư viện như Stepper.
- Tín hiệu PWM và xung tín hiệu: kiểm soát tốc độ và vị trí của động cơ.
Mạch điều khiển
Mạch điều khiển là thành phần liên kết các thiết bị trong hệ thống, đảm bảo sự tương thích giữa các linh kiện và động cơ.
- Thành phần chính:
- Nguồn điện: cung cấp năng lượng ổn định cho toàn bộ hệ thống.
- Mạch tín hiệu analog: chuyển đổi tín hiệu từ biến trở để Arduino xử lý.
- Bộ điều khiển trung tâm: như IC ULN2003A hoặc A4988, giúp điều khiển động cơ với độ chính xác cao.
Kết nối cảm biến
Cảm biến xoay và hệ thống truyền động đóng vai trò quan trọng trong việc giám sát và hỗ trợ chuyển động cơ khí của động cơ bước. Những cảm biến này cung cấp thông tin phản hồi về tốc độ và vị trí của động cơ, giúp tối ưu hóa hoạt động.
Cách điều khiển động cơ bước bằng biến trở
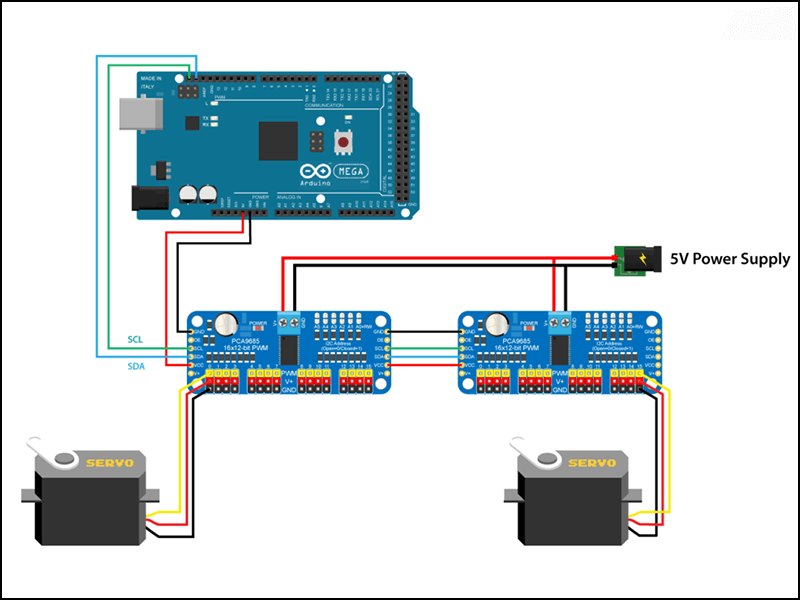
Kết nối phần cứng
Việc thiết lập phần cứng là bước đầu tiên để điều khiển động cơ bước bằng biến trở. Đảm bảo rằng các kết nối được thực hiện chính xác để hệ thống hoạt động ổn định.
- Kết nối biến trở: Biến trở được nối với cổng vào analog trên Arduino, thường là chân A0. Tín hiệu từ biến trở sẽ được chuyển đổi thành tín hiệu điện áp analog, phản ánh giá trị điều chỉnh.
- Kết nối động cơ bước: Động cơ bước được kết nối qua module điều khiển như A4988 hoặc ULN2003A. Các module này giúp chuyển đổi tín hiệu điều khiển thành dòng điện điều khiển các cuộn dây của động cơ.
- Đảm bảo nguồn điện: Nguồn điện cần ổn định và đáp ứng yêu cầu của cả Arduino và động cơ. Sử dụng pin hoặc bộ nguồn điện để cấp đủ dòng và điện áp.

Lập trình trên Arduino
Sau khi hoàn tất phần cứng, bước tiếp theo là lập trình Arduino để xử lý tín hiệu từ biến trở và điều khiển động cơ bước.
- Đọc giá trị từ biến trở: Arduino sử dụng hàm analogRead() để đọc tín hiệu analog từ biến trở. Giá trị này được chuyển đổi thành dữ liệu số trong khoảng từ 0 đến 1023.
- Điều chỉnh tốc độ động cơ: Dựa trên giá trị từ biến trở, tốc độ của động cơ được điều chỉnh bằng cách sử dụng tín hiệu PWM để kiểm soát tần số xung gửi đến động cơ.
- Điều chỉnh vị trí: Giá trị từ biến trở cũng có thể được sử dụng để tính toán số bước cần thiết, từ đó điều chỉnh vị trí góc của động cơ.
Xem thêm: Tổng quan về motor điện
Ví dụ mã nguồn
Dưới đây là đoạn mã mẫu để điều khiển tốc độ động cơ bước bằng biến trở:
#include <Stepper.h>
#define STEPS 200
Stepper stepper(STEPS, 8, 9, 10, 11);
void setup() {
stepper.setSpeed(10);
Serial.begin(9600);
}
void loop() {
int value = analogRead(A0); // Đọc giá trị từ biến trở
int speed = map(value, 0, 1023, 0, 100); // Chuyển đổi giá trị
stepper.setSpeed(speed);
stepper.step(1); // Quay động cơ một bước
delay(10);
}
Ứng dụng thực tế
Trong công nghiệp
Hệ thống điều khiển động cơ bước bằng biến trở được ứng dụng rộng rãi trong các ngành công nghiệp.
- Máy CNC: Động cơ bước giúp di chuyển chính xác các trục X, Y, Z trong máy cắt và khắc CNC.
- Hệ thống tự động hóa: Arduino và biến trở cung cấp giải pháp điều khiển linh hoạt trong dây chuyền sản xuất, đảm bảo độ chính xác cao.
Trong đời sống
Ngoài công nghiệp, động cơ bước cũng được ứng dụng trong các thiết bị gia đình và nghiên cứu.
- Tự động hóa gia đình: Điều chỉnh tốc độ và hướng quay của quạt thông minh hoặc hệ thống rèm tự động.
- Robot tự động: Hệ thống này thường được sử dụng trong các mô hình robot giáo dục để di chuyển chính xác.
Ưu điểm và hạn chế
Ưu điểm
- Tính linh hoạt: Arduino dễ lập trình và có thể tích hợp với nhiều cảm biến và linh kiện.
- Độ chính xác cao: Hệ thống điều khiển đảm bảo vị trí và tốc độ của động cơ luôn ổn định.
- Chi phí thấp: Giải pháp này phù hợp cho các dự án nhỏ và vừa với ngân sách hạn chế.
Hạn chế
- Yêu cầu kiến thức kỹ thuật: Người dùng cần nắm vững lập trình và thiết kế mạch điện tử.
- Hạn chế hiệu suất: Trong các ứng dụng công nghiệp lớn, hệ thống này có thể không đáp ứng được yêu cầu về công suất và tốc độ.
Hướng dẫn tối ưu hóa
Điều chỉnh tốc độ động cơ bước
Tối ưu hóa giá trị biến trở để động cơ bước hoạt động hiệu quả và ổn định hơn. Giá trị tín hiệu cần được hiệu chỉnh sao cho phù hợp với yêu cầu thực tế.
Tối ưu hóa mạch điều khiển
- Sử dụng bộ điều khiển PID: Điều chỉnh tín hiệu xung PWM một cách chính xác hơn, giúp cải thiện hiệu suất động cơ.
- Giảm nhiễu tín hiệu: Đảm bảo tín hiệu từ cảm biến không bị nhiễu, bằng cách sử dụng các bộ lọc tín hiệu hoặc thiết kế mạch phù hợp.
Cải thiện hiệu suất phần mềm
- Tối ưu thuật toán điều khiển: Sử dụng các thuật toán nâng cao để xử lý tín hiệu nhanh và chính xác hơn.
- Quản lý tài nguyên hiệu quả: Đảm bảo Arduino không bị quá tải khi xử lý nhiều tín hiệu đồng thời.
Kết luận
Điều khiển động cơ bước bằng biến trở là một giải pháp hiệu quả và dễ triển khai, phù hợp cho cả người dùng mới và các kỹ sư chuyên nghiệp. Sự kết hợp giữa Arduino, biến trở và các linh kiện khác mang lại khả năng ứng dụng rộng rãi trong công nghiệp và đời sống. Việc hiểu rõ cách thiết lập và tối ưu hóa hệ thống sẽ giúp bạn khai thác tối đa tiềm năng của giải pháp này.