Khám phá bí mật điều khiển động cơ bước bằng A4988: Hiệu suất vượt trội chỉ trong 5 bước!

Điều khiển động cơ bước bằng A4988 không chỉ là một công việc kỹ thuật mà còn là nghệ thuật trong việc tối ưu hóa hiệu suất hệ thống. Với vai trò là một kỹ sư hoặc nhà sáng tạo, bạn đang tiếp cận một giải pháp mạnh mẽ để điều hướng các ứng dụng tự động hóa chính xác, từ dây chuyền sản xuất đến robot thông minh. Bài viết này sẽ cung cấp cho bạn kiến thức cần thiết để làm chủ Driver A4988, từ thiết lập cơ bản đến cách khai thác tối đa tiềm năng của nó.
Giới thiệu
Động cơ bước là thành phần quan trọng trong các hệ thống tự động hóa và nhúng, cho phép điều khiển chuyển động chính xác từng bước một. Để khai thác tối đa tiềm năng của động cơ bước, Driver A4988 là một giải pháp phổ biến, hỗ trợ các chế độ vi bước và các tính năng bảo vệ mạch hiệu quả. Với sự hỗ trợ từ Arduino, việc lập trình và triển khai các ứng dụng sử dụng động cơ bước trở nên đơn giản hơn, từ máy in 3D, robot tự hành đến dây chuyền sản xuất.
A4988 không chỉ là một bộ điều khiển động cơ bước, mà còn là công cụ giúp kỹ sư tối ưu hóa hiệu suất hệ thống. Việc hiểu rõ nguyên lý hoạt động và cách kết nối, lập trình A4988 không chỉ giúp bạn đạt hiệu quả cao mà còn giảm thiểu lỗi trong quá trình vận hành.
Thành phần và chuẩn bị
Các thành phần chính
A4988 là module điều khiển động cơ bước phổ biến, được thiết kế nhỏ gọn và dễ sử dụng. Nó hỗ trợ nhiều chế độ vi bước như full-step, half-step, 1/4, 1/8 và 1/16, cho phép kiểm soát độ mượt mà và chính xác của chuyển động. Các tính năng bảo vệ như chống quá dòng, quá nhiệt giúp A4988 hoạt động ổn định trong thời gian dài.
Động cơ bước NEMA 17 thường được sử dụng kết hợp với A4988 nhờ tính tương thích và khả năng cung cấp mô-men xoắn ổn định. Để cấp nguồn cho A4988, bạn cần sử dụng hai loại nguồn điện: VDD (3-5.5V) để cấp nguồn logic và VMOT (8-35V) để cấp nguồn cho động cơ. Các thiết bị hỗ trợ như Breadboard, tụ điện giảm nhiễu, và biến trở điều chỉnh Vref giúp cấu hình mạch dễ dàng và ổn định hơn.
Sơ đồ chân Driver A4988
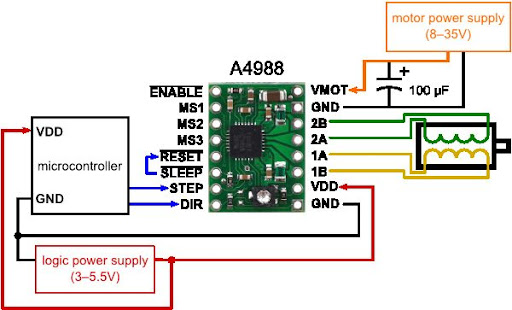
A4988 có các chân tín hiệu chính như STEP, DIR, và ENABLE. Chân STEP nhận xung tín hiệu để điều khiển số bước động cơ, trong khi DIR quyết định hướng quay. Chân ENABLE có thể được sử dụng để bật hoặc tắt mạch điều khiển khi cần.
Ngoài ra, các chân MS1, MS2, MS3 được dùng để chọn chế độ vi bước, cho phép thay đổi từ chế độ full-step đến vi bước 1/16. Các chân 1A, 1B, 2A, 2B kết nối trực tiếp với cuộn dây động cơ bước, trong khi VDD và GND cấp nguồn logic cho module, còn VMOT và GND cấp nguồn cho động cơ. Tụ điện giảm nhiễu được khuyến nghị lắp giữa VMOT và GND để tăng cường độ ổn định.
Xem thêm: Tổng quan về motor điện
Nguyên lý hoạt động
Điều khiển tín hiệu STEP-DIR
Driver A4988 hoạt động dựa trên nguyên tắc tạo xung tín hiệu tại chân STEP để điều khiển số bước di chuyển của động cơ. Tần số của xung tín hiệu quyết định tốc độ quay, trong khi chân DIR xác định hướng quay của động cơ. Chân ENABLE dùng để bật tắt mạch điều khiển, giúp tiết kiệm năng lượng khi không cần sử dụng.
Việc lập trình tín hiệu STEP và DIR trên vi điều khiển như Arduino Uno R3 là bước quan trọng để đạt được sự chính xác trong vận hành. Đối với các ứng dụng cần điều chỉnh tốc độ hoặc hướng quay động cơ, các chân tín hiệu này sẽ là trung tâm của mọi hoạt động.
Chế độ vi bước
Chế độ vi bước là điểm nổi bật của A4988, cho phép bạn tăng độ chính xác và giảm rung động khi động cơ vận hành. Bằng cách điều chỉnh các chân MS1, MS2, MS3, bạn có thể lựa chọn giữa các chế độ như full-step, half-step, 1/4, 1/8, và 1/16 step. Mỗi chế độ tương ứng với mức độ mượt mà khác nhau, giúp tối ưu hóa theo yêu cầu từng ứng dụng.
Các kỹ sư cần lưu ý rằng chế độ vi bước không chỉ cải thiện độ mượt mà mà còn ảnh hưởng đến dòng điện và điện áp cần thiết. Điều này đòi hỏi phải tính toán và cấu hình chính xác để tránh quá tải cho driver hoặc động cơ.
Hướng dẫn kết nối
Kết nối phần cứng
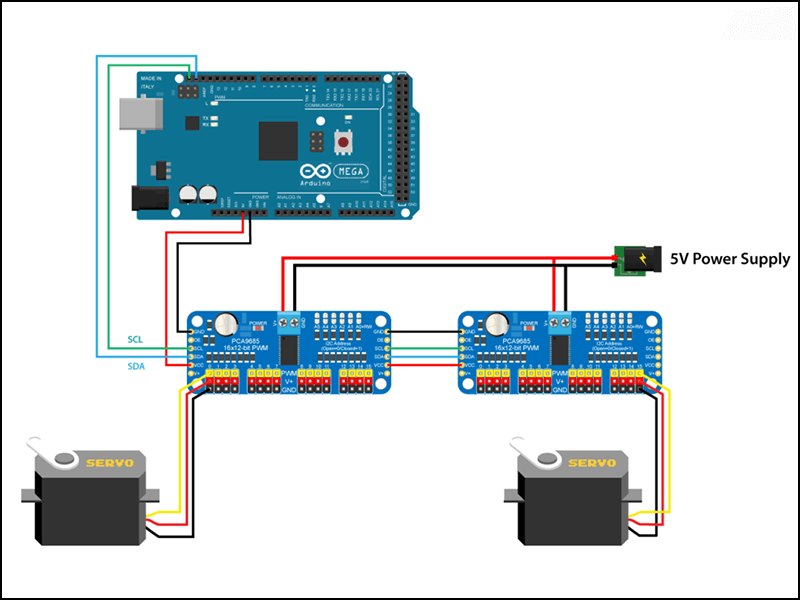
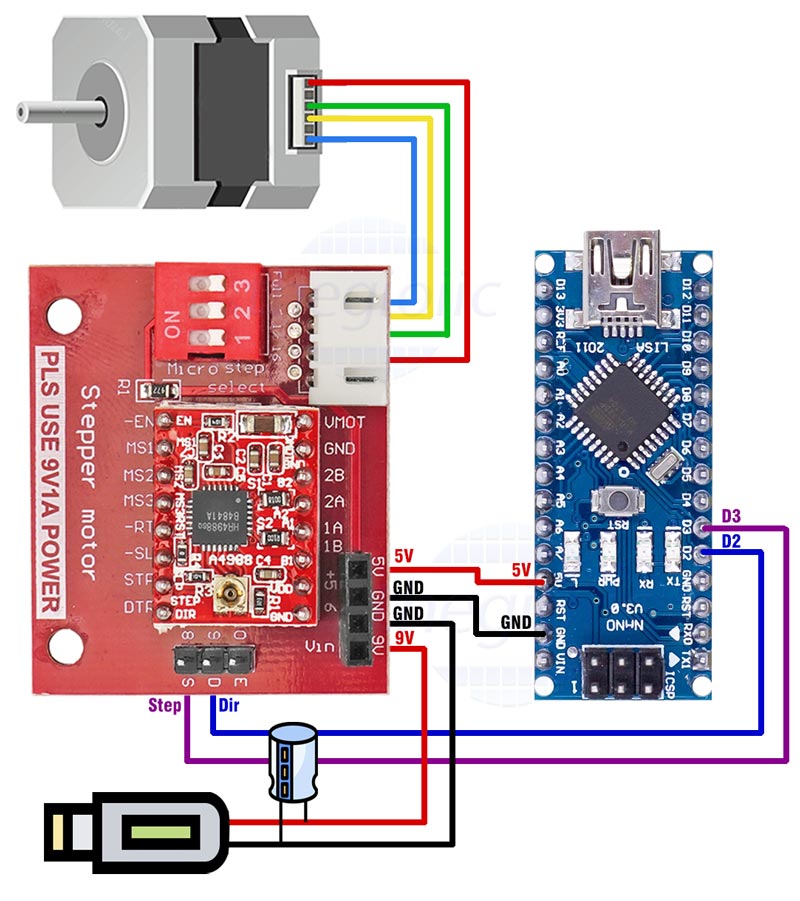
Việc kết nối phần cứng đúng cách là bước đầu tiên để đảm bảo hệ thống vận hành ổn định. Đầu tiên, bạn cần cung cấp hai nguồn điện riêng biệt: VMOT để cấp điện cho động cơ bước và VDD để cấp nguồn logic cho Driver A4988. Đảm bảo rằng tụ điện giảm nhiễu được lắp giữa VMOT và GND để bảo vệ module khỏi các xung nhiễu.
Các chân tín hiệu như STEP và DIR cần được kết nối với các chân digital của vi điều khiển, ví dụ như Arduino Uno R3. Đồng thời, các chân MS1, MS2, và MS3 sẽ được cấu hình để lựa chọn chế độ vi bước phù hợp. Cuối cùng, các cuộn dây động cơ bước cần được kết nối chính xác vào các chân 1A, 1B, 2A, và 2B trên Driver A4988.
Cấu hình mạch
Sau khi hoàn tất kết nối, bạn cần điều chỉnh biến trở trên Driver A4988 để đặt giới hạn dòng điện phù hợp với động cơ bước. Công thức cơ bản để tính dòng điện là:
css
Copy code
Giới hạn dòng điện = Vref × 2.5
Điều này không chỉ bảo vệ động cơ mà còn đảm bảo hiệu suất tối ưu. Ngoài ra, cần kiểm tra xem mạch đã có hệ thống tản nhiệt hoặc quạt làm mát nếu hoạt động trong môi trường nhiệt độ cao.
Lập trình điều khiển
Sử dụng thư viện AccelStepper
Thư viện AccelStepper là công cụ hỗ trợ mạnh mẽ giúp đơn giản hóa việc lập trình điều khiển động cơ bước. Thư viện này cung cấp các phương pháp linh hoạt để điều chỉnh tốc độ, hướng quay, và quãng đường di chuyển của động cơ.
Ví dụ mã mẫu để điều khiển động cơ bước với chế độ vi bước:
#include <AccelStepper.h>
#define STEP_PIN 3
#define DIR_PIN 4
AccelStepper stepper(AccelStepper::DRIVER, STEP_PIN, DIR_PIN);
void setup() {
stepper.setMaxSpeed(1000); // Tốc độ tối đa
stepper.setAcceleration(500); // Gia tốc
}
void loop() {
stepper.moveTo(200); // Di chuyển 200 bước
stepper.runToPosition(); // Chạy đến vị trí đặt trước
delay(1000);
stepper.moveTo(-200); // Di chuyển ngược 200 bước
stepper.runToPosition();
delay(1000);
}
Điều chỉnh tốc độ và hướng
Việc lập trình các chân tín hiệu STEP và DIR cho phép bạn điều khiển tốc độ quay cũng như hướng quay của động cơ. Trong các ứng dụng thực tế, bạn có thể điều chỉnh tần số xung tín hiệu tại chân STEP để thay đổi tốc độ động cơ và sử dụng tín hiệu tại chân DIR để thay đổi hướng.
Các lưu ý khi sử dụng
Điều chỉnh Vref
Điện áp tham chiếu (Vref) cần được đo cẩn thận để thiết lập giới hạn dòng điện phù hợp với thông số của động cơ bước. Nếu dòng điện vượt quá giới hạn cho phép, động cơ và Driver A4988 có thể bị hư hại. Sử dụng một đồng hồ đo điện áp chính xác để tinh chỉnh biến trở trên Driver A4988.
Bảo vệ driver
Hệ thống tản nhiệt hoặc quạt làm mát là yếu tố quan trọng khi Driver A4988 hoạt động trong thời gian dài. Ngoài ra, cần tránh các kết nối lỏng lẻo hoặc chập chờn, vì điều này có thể gây ra sự cố nghiêm trọng cho mạch.
Tối ưu hóa hiệu suất
Lựa chọn chế độ vi bước phù hợp với yêu cầu ứng dụng sẽ giúp cải thiện hiệu suất động cơ và tiết kiệm năng lượng. Đồng thời, đảm bảo rằng nguồn điện cung cấp luôn ổn định, đặc biệt là nguồn VMOT, để tránh nhiễu và giảm thiểu rung động.
Ứng dụng thực tế
Driver A4988 được sử dụng rộng rãi trong nhiều lĩnh vực. Một số ứng dụng phổ biến bao gồm:
- Máy in 3D: Điều khiển các trục XYZ để tạo ra các sản phẩm chính xác.
- Máy CNC: Đảm bảo chuyển động chính xác cho các dao cắt hoặc khắc.
- Robot tự hành: Điều khiển các bánh xe hoặc cánh tay robot với độ chính xác cao.
- Hệ thống nhúng và tự động hóa: Điều khiển các thiết bị trong dây chuyền sản xuất.
Các ứng dụng này không chỉ yêu cầu độ chính xác mà còn đòi hỏi sự ổn định và bền bỉ, điều mà A4988 hoàn toàn đáp ứng được.
Tổng kết
Driver A4988 là lựa chọn lý tưởng cho việc điều khiển động cơ bước trong các hệ thống nhúng và tự động hóa. Từ khả năng hỗ trợ chế độ vi bước đến tính năng bảo vệ mạch, A4988 mang lại hiệu suất đáng tin cậy và dễ dàng triển khai với Arduino hoặc các vi điều khiển khác.
Với sự hiểu biết đúng đắn và cẩn thận trong cấu hình, bạn có thể khai thác tối đa tiềm năng của A4988, từ các ứng dụng cá nhân đến các dự án công nghiệp. Nếu bạn cần thêm hỗ trợ hoặc thông tin chi tiết, hãy tham khảo Dongco3pha.com để nhận được giải pháp tốt nhất.