Khám Phá Bí Mật: Làm Chủ Cách Điều Khiển Động Cơ Bước Bằng Vi Điều Khiển 8051 Trong 5 Phút!

Động cơ bước đóng vai trò quan trọng trong các hệ thống tự động hóa, từ thiết bị gia dụng đến công nghệ chế tạo công nghiệp. Với khả năng điều khiển chính xác, động cơ bước được xem là lựa chọn hàng đầu trong nhiều ứng dụng điện tử hiện đại. Bài viết này tập trung hướng dẫn cách sử dụng vi điều khiển 8051 để điều khiển động cơ bước, từ thiết kế mạch phần cứng đến lập trình phần mềm, nhằm mang lại hiểu biết sâu sắc và giải pháp thực tiễn cho người dùng.
Nguyên lý hoạt động của động cơ bước
Động cơ bước là gì?
Động cơ bước là loại động cơ điện kỹ thuật số hoạt động nhờ các xung điện rời rạc. Với cấu tạo gồm rotor, cuộn dây stato và bộ kích pha, động cơ bước chuyển đổi các tín hiệu xung điện thành chuyển động quay từng bước một. Điều này cho phép điều khiển chính xác vị trí và tốc độ của rotor, phù hợp cho các ứng dụng yêu cầu độ chính xác cao như máy in 3D, CNC, và robot tự động.

Góc quay của mỗi bước được gọi là góc bước, là thông số kỹ thuật cơ bản của động cơ. Góc bước thường phụ thuộc vào cấu tạo của rotor và số lượng cuộn dây trong stato. Ví dụ, động cơ có 4 pha và 50 răng sẽ có góc bước là 1,8 độ.
Góc bước và trình tự kích pha
Góc bước là yếu tố quyết định độ chính xác của chuyển động rotor. Để đạt được điều này, trình tự kích pha được thiết kế để kích hoạt các cuộn dây stato theo thứ tự cụ thể, tạo ra từ trường quay làm rotor chuyển động. Quá trình này được thực hiện thông qua mạch điều khiển, thường kết hợp vi điều khiển 8051 và mạch khuếch đại dòng như ULN2003.
So với các loại động cơ khác, động cơ bước nổi bật nhờ khả năng kiểm soát góc quay mà không cần cảm biến vị trí. Tuy nhiên, điều này đòi hỏi thiết kế mạch điều khiển và lập trình tối ưu để đảm bảo độ chính xác và hiệu quả hoạt động.
Vi điều khiển 8051 và mạch điều khiển động cơ bước
Cấu trúc vi điều khiển 8051
Vi điều khiển 8051 là một trong những lựa chọn phổ biến để điều khiển động cơ bước nhờ tính linh hoạt và dễ lập trình. Với các cổng I/O như P1.0 đến P1.3, 8051 có thể điều khiển trực tiếp tín hiệu đến ULN2003. Các chức năng lập trình tích hợp như TMOD, SJMP, và TF0 cho phép xử lý tín hiệu nhanh chóng, hỗ trợ việc kiểm soát động cơ với độ chính xác cao.
Vi điều khiển 8051 không chỉ xử lý tín hiệu mà còn hỗ trợ tối ưu hóa thời gian trễ và chu kỳ tín hiệu, giúp cải thiện hiệu suất vận hành của động cơ. Đây là yếu tố then chốt để đạt được độ ổn định và chính xác trong hệ thống.
Mạch trung gian ULN2003
ULN2003 là một mạch khuếch đại dòng tích hợp, sử dụng cấu trúc transistor Darlington để tăng cường khả năng điều khiển dòng điện từ vi điều khiển đến cuộn dây stato. Mạch này không chỉ đảm bảo tín hiệu đủ mạnh để kích hoạt động cơ mà còn bảo vệ vi điều khiển khỏi các hư hỏng do quá tải dòng.
Cấu trúc mạch ULN2003 đơn giản nhưng hiệu quả, bao gồm 7 kênh đầu vào và đầu ra, phù hợp cho các ứng dụng điều khiển động cơ bước 4 pha. Khi kết hợp với vi điều khiển 8051, ULN2003 giúp đơn giản hóa thiết kế mạch và tăng độ tin cậy của hệ thống.
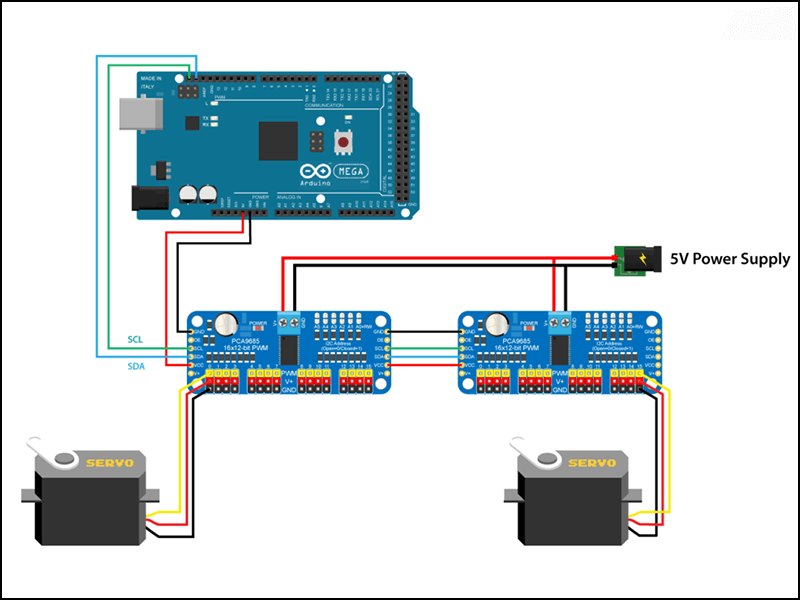
Sơ đồ mạch điều khiển
Mạch điều khiển động cơ bước bằng vi điều khiển 8051 bao gồm ba thành phần chính: vi điều khiển, mạch khuếch đại dòng ULN2003, và động cơ bước. Các cổng P1.0 đến P1.3 được kết nối với đầu vào của ULN2003, trong khi đầu ra của mạch này được liên kết với các pha của động cơ bước. Nguồn cấp điện phải đảm bảo ổn định để tránh gián đoạn tín hiệu hoặc giảm hiệu suất.
Sơ đồ mạch này không chỉ đơn giản trong thiết kế mà còn dễ dàng mở rộng, cho phép tích hợp thêm cảm biến vị trí hoặc mạch bảo vệ để nâng cao khả năng vận hành.
Lập trình điều khiển động cơ bước bằng 8051
Chuẩn bị lập trình
Để lập trình điều khiển động cơ bước bằng vi điều khiển 8051, cần chuẩn bị môi trường lập trình phù hợp. Ngôn ngữ thường được sử dụng là Assembly hoặc C, với phần mềm Keil uVision để biên dịch mã. Ngoài ra, công cụ Proteus giúp mô phỏng tín hiệu và kiểm tra trước khi triển khai thực tế.
Xem thêm: Tổng quan về motor điện
Quá trình chuẩn bị cũng bao gồm thiết lập các cổng I/O, cấu hình tín hiệu PWM và đảm bảo thời gian trễ chính xác giữa các xung. Những yếu tố này giúp tối ưu hóa hiệu suất điều khiển và giảm thiểu sai số trong quá trình vận hành.
Quy trình lập trình
Quy trình lập trình bắt đầu bằng việc khởi tạo các cổng I/O để truyền tín hiệu điều khiển đến ULN2003 và từ đó kích hoạt động cơ bước. Tín hiệu PWM được tạo ra để điều chỉnh tốc độ và hướng quay của rotor. Dưới đây là một ví dụ mã Assembly đơn giản:
A1 EQU P1.0
A2 EQU P1.1
A3 EQU P1.2
A4 EQU P1.3
ORG 00H
MAIN:
SETB A1
CLR A2
ACALL DELAY
SETB A2
CLR A3
ACALL DELAY
SETB A3
CLR A4
ACALL DELAY
SJMP MAIN
DELAY:
MOV R6, #100
BACK:
DJNZ R6, BACK
RET
END
Mã này minh họa cách kích hoạt từng pha của động cơ, đảm bảo chuyển động quay mượt mà và chính xác.
Tối ưu hóa lập trình
Một yếu tố quan trọng trong lập trình là tối ưu hóa thời gian trễ giữa các bước quay, điều này ảnh hưởng trực tiếp đến tốc độ và độ chính xác. Tích hợp cảm biến vị trí vào hệ thống là một cách cải tiến giúp nâng cao khả năng kiểm soát và giảm sai số. Ngoài ra, lập trình có thể được tối ưu hóa để tiết kiệm tài nguyên hệ thống, đặc biệt khi sử dụng trong các ứng dụng công nghiệp lớn.
Ứng dụng thực tế
Trong tự động hóa
Động cơ bước được ứng dụng rộng rãi trong các hệ thống tự động hóa như robot tự động, máy in 3D và máy CNC. Khả năng kiểm soát góc quay chính xác giúp các thiết bị này hoạt động hiệu quả và ổn định. Đặc biệt trong sản xuất công nghiệp, động cơ bước giúp tối ưu hóa quy trình, giảm thiểu sai số và nâng cao chất lượng sản phẩm.
Máy in 3D là một ví dụ điển hình, nơi động cơ bước đảm bảo các chuyển động theo trục X, Y và Z đạt độ chính xác cao, tạo nên những sản phẩm tinh vi và sắc nét.
Trong thiết bị y tế
Trong lĩnh vực y tế, động cơ bước góp phần quan trọng vào các thiết bị cơ điện tử như máy chẩn đoán hình ảnh và thiết bị phẫu thuật. Các hệ thống này đòi hỏi sự ổn định và độ chính xác tuyệt đối, điều mà động cơ bước có thể đáp ứng nhờ khả năng kiểm soát từng bước quay.
Việc sử dụng động cơ bước trong y tế không chỉ cải thiện hiệu quả điều trị mà còn giảm thiểu rủi ro, mang lại lợi ích thiết thực cho cả bệnh nhân và bác sĩ.
Trong hệ thống tích hợp
Động cơ bước cũng được tích hợp trong các hệ thống servo và các thiết bị tự động phức tạp. Việc kết hợp động cơ bước với cảm biến vị trí và bộ mã hóa tín hiệu giúp mở rộng khả năng ứng dụng, từ các thiết bị gia dụng thông minh đến hệ thống công nghiệp hiện đại.
Lưu ý và mẹo thiết kế hệ thống
Để thiết kế một hệ thống điều khiển động cơ bước hiệu quả, cần chú ý đến các yếu tố sau:
- Độ ổn định: Sử dụng nguồn cấp điện ổn định và mạch bảo vệ để đảm bảo hiệu suất tín hiệu.
- Tương tác phần cứng và phần mềm: Thiết lập tín hiệu tương thích giữa vi điều khiển, mạch khuếch đại dòng và động cơ.
- Lựa chọn vật liệu: Đảm bảo chất lượng linh kiện phù hợp với yêu cầu tải và độ bền trong môi trường làm việc.
Các mẹo này giúp hệ thống hoạt động ổn định trong thời gian dài, giảm thiểu sự cố và tối ưu hóa chi phí vận hành.
Phân tích và cải tiến
Phân tích góc pha và hiệu ứng thời gian
Phân tích góc pha giúp tối ưu hóa trình tự kích pha, đảm bảo động cơ hoạt động mượt mà và chính xác. Nghiên cứu ảnh hưởng của thời gian trễ cũng cần được thực hiện để cải thiện tốc độ và độ nhạy của hệ thống.
Phân tích động học và mô phỏng
Mô phỏng động học rotor giúp dự đoán hiệu suất và phát hiện sớm các vấn đề tiềm ẩn trong hệ thống. Các công cụ mô phỏng như Proteus hỗ trợ kỹ sư tối ưu hóa thiết kế trước khi đưa vào sản xuất.
Kết luận
Điều khiển động cơ bước bằng vi điều khiển 8051 không chỉ mang lại hiệu quả cao mà còn mở rộng khả năng ứng dụng trong các lĩnh vực từ tự động hóa đến y tế. Với các bước hướng dẫn cụ thể trong bài viết, hy vọng bạn sẽ xây dựng được một hệ thống điều khiển đáng tin cậy, đáp ứng các yêu cầu kỹ thuật hiện đại. Tiềm năng phát triển của công nghệ này hứa hẹn sẽ còn tiếp tục mở ra nhiều cơ hội mới trong tương lai.