Khám Phá Cách Điều Khiển Động Cơ Bước Với Arduino – Giải Pháp Tối Ưu Cho Các Dự Án Công Nghiệp

Điều khiển động cơ bước bằng Arduino là một giải pháp hiệu quả, mang tính ứng dụng cao trong các ngành công nghiệp và kỹ thuật. Từ việc điều chỉnh vị trí chính xác của động cơ trong máy in 3D, robot công nghiệp, đến các mô hình CNC, Arduino mở ra cơ hội tối ưu hóa quy trình sản xuất với chi phí thấp. Đây không chỉ là công cụ cho các kỹ sư mà còn là nền tảng học tập quan trọng cho sinh viên kỹ thuật và nhà đầu tư thiết bị.
Giới thiệu về điều khiển động cơ bước Arduino
Arduino là nền tảng lập trình mạnh mẽ, được sử dụng phổ biến trong điều khiển động cơ bước. Với các dòng Arduino như Arduino Uno và Arduino Mega, việc thiết kế và phát triển các ứng dụng công nghiệp, mô hình CNC, máy in 3D hay robot tự động trở nên dễ dàng và hiệu quả hơn.

Động cơ bước, với khả năng điều khiển chính xác vị trí và tốc độ, là giải pháp lý tưởng trong các dự án yêu cầu độ chính xác cao. Kết hợp với các module driver như A4988, DRV8825 hay ULN2003, Arduino tạo thành một hệ thống điều khiển linh hoạt, phù hợp với nhiều ứng dụng kỹ thuật.
Cấu tạo và nguyên lý hoạt động của động cơ bước
Động cơ bước lưỡng cực và đơn cực
Động cơ bước có hai loại chính: lưỡng cực và đơn cực. Động cơ lưỡng cực thường sử dụng 4 dây, đòi hỏi driver chuyên dụng như A4988 hoặc DRV8825. Loại động cơ này phổ biến trong các mô hình CNC và robot công nghiệp nhờ khả năng hoạt động mạnh mẽ và ổn định.
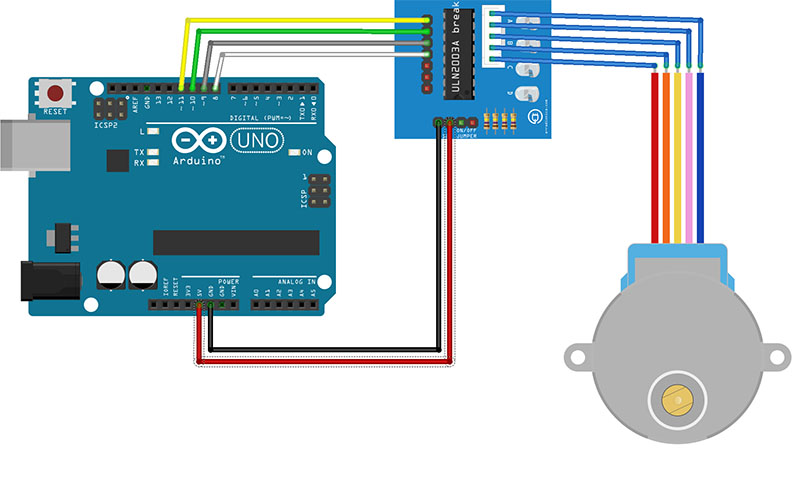
Ngược lại, động cơ đơn cực có 5 hoặc 6 dây, thường được điều khiển bằng module ULN2003. Động cơ đơn cực như 28BYJ-48 có thiết kế nhỏ gọn, dễ kết nối với Arduino, phù hợp cho các dự án DIY và mô hình nhỏ.
Các thông số kỹ thuật quan trọng
Thông số kỹ thuật của động cơ bước bao gồm số bước mỗi vòng (200 bước hoặc 400 bước), góc bước (1.8 độ hoặc 0.9 độ), và dòng điện định mức. Việc hiểu rõ các thông số này giúp tối ưu hóa hiệu suất và đảm bảo động cơ hoạt động ổn định.
Chế độ vi bước như Full Step, 1/16 Step hoặc 1/32 Step cho phép tăng độ chính xác và giảm độ rung, đặc biệt quan trọng trong các ứng dụng yêu cầu độ chính xác cao như máy in 3D hay hệ thống tự động hóa.
Phần cứng hỗ trợ điều khiển động cơ bước
Arduino
Arduino Uno là lựa chọn phổ biến nhất nhờ sự đơn giản và dễ lập trình. Với Arduino Mega, bạn có thêm nhiều chân I/O để kết nối với các thiết bị khác, mở rộng khả năng điều khiển. Arduino IDE cung cấp môi trường lập trình thân thiện, hỗ trợ các thư viện như Stepper Library và AccelStepper.
Driver động cơ
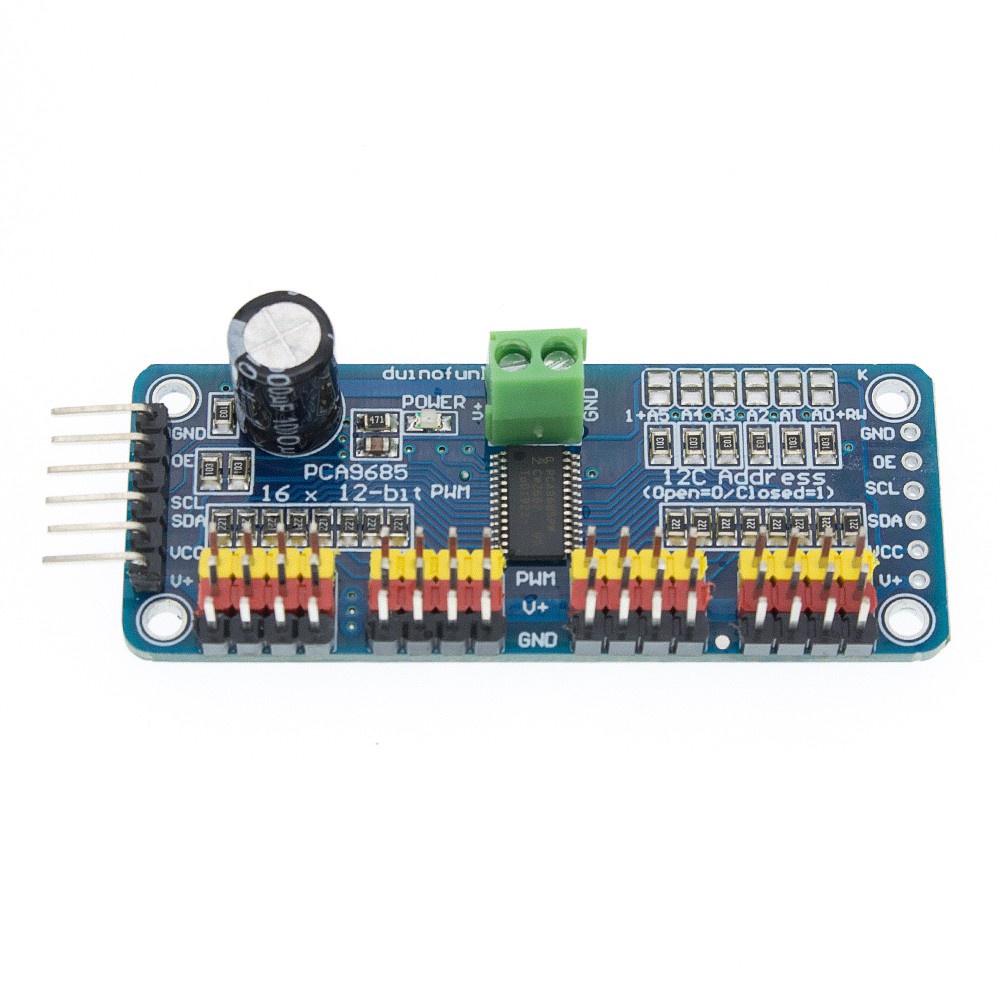
Driver là thành phần không thể thiếu trong hệ thống điều khiển động cơ bước. A4988 và DRV8825 là hai driver phổ biến, hỗ trợ chế độ vi bước và cung cấp khả năng điều khiển động cơ lưỡng cực. Trong khi đó, module L298N và ULN2003 phù hợp hơn cho động cơ đơn cực và các ứng dụng nhỏ gọn.
Động cơ bước
28BYJ-48 là loại động cơ bước đơn cực, nhỏ gọn, thường dùng trong các dự án DIY. Động cơ bước lưỡng cực, với khả năng chịu tải cao và hoạt động ổn định, được ứng dụng nhiều trong các mô hình CNC, robot tự động và máy in 3D.
Nguồn cấp
Nguồn cấp ổn định là yếu tố quan trọng để động cơ và driver hoạt động hiệu quả. Bộ nguồn phải đáp ứng đúng yêu cầu điện áp và dòng điện của hệ thống, tránh các sự cố do quá tải hoặc sụt áp.
Xem thêm: Tổng quan về motor điện
Lập trình điều khiển động cơ bước với Arduino
Thư viện hỗ trợ
Arduino IDE hỗ trợ hai thư viện chính cho điều khiển động cơ bước: Stepper Library và AccelStepper. Stepper Library thích hợp cho các ứng dụng cơ bản, trong khi AccelStepper mang lại sự linh hoạt hơn với tính năng tăng giảm tốc và điều khiển nhiều động cơ cùng lúc.
Lập trình mẫu
Khi sử dụng driver A4988 hoặc DRV8825, lập trình mẫu thường tập trung vào điều chỉnh tốc độ, hướng quay và chế độ vi bước. Bằng cách sử dụng các thư viện hỗ trợ, người dùng có thể dễ dàng điều khiển động cơ với độ chính xác cao và hiệu quả.
Ví dụ thực hành
Các dự án thực tế như robot tự động hay mô hình CNC thường tận dụng chế độ vi bước để đạt được độ chính xác mong muốn. Việc lập trình và thử nghiệm trực tiếp giúp hiểu rõ hơn về cách tối ưu hóa hiệu suất động cơ và driver.
Sơ đồ kết nối và hướng dẫn thiết lập
Sơ đồ mạch điều khiển
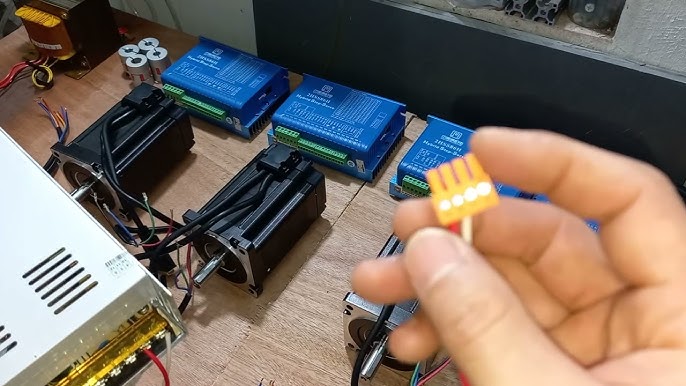
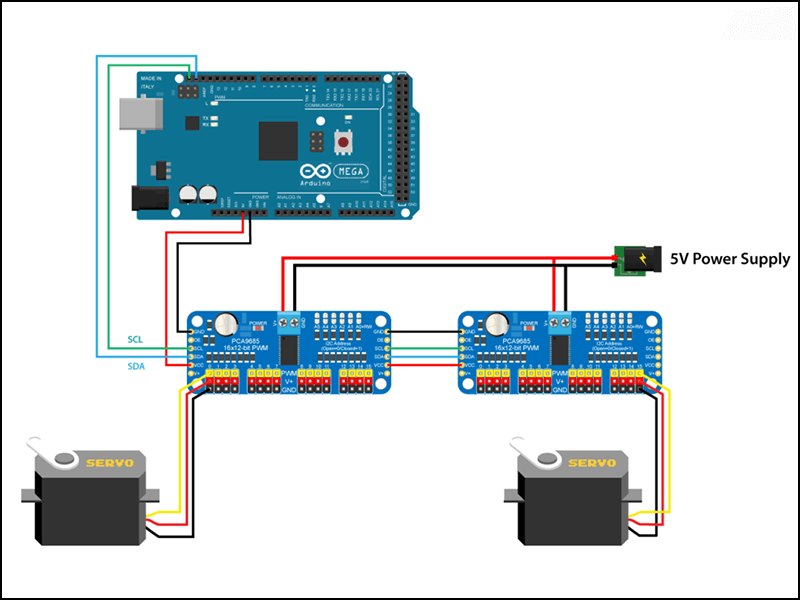
Để điều khiển động cơ bước, hệ thống cơ bản bao gồm Arduino, driver động cơ và động cơ bước. Driver A4988 hoặc DRV8825 kết nối với Arduino thông qua các chân tín hiệu như STEP, DIR và ENABLE. Động cơ bước lưỡng cực hoặc đơn cực được nối với driver qua các cuộn dây pha A và pha B.
Nguồn cấp được kết nối với driver để cung cấp điện áp phù hợp cho động cơ. Điều quan trọng là đảm bảo sơ đồ đấu nối chính xác, tránh các sự cố ngắn mạch hoặc cung cấp sai điện áp. Module như L298N hoặc ULN2003 cũng có sơ đồ kết nối tương tự nhưng dành cho các động cơ nhỏ hơn.
Hướng dẫn cấu hình
Cài đặt nguồn cấp đóng vai trò then chốt trong việc đảm bảo hiệu suất hoạt động của động cơ. Đối với driver A4988 hoặc DRV8825, cần sử dụng các công tắc DIP để điều chỉnh chế độ vi bước như Full Step, 1/16 Step hoặc 1/32 Step. Việc cấu hình đúng chế độ này giúp cải thiện độ chính xác và giảm rung động.
Ngoài ra, nên kiểm tra điện áp tham chiếu của driver để đảm bảo dòng điện cấp cho động cơ nằm trong giới hạn an toàn. Quá trình cấu hình có thể thực hiện bằng cách sử dụng một đồng hồ vạn năng đo điện áp tại điểm VREF trên driver.
Thực hành điều khiển động cơ bước
Sau khi hoàn tất thiết lập phần cứng, chạy thử nghiệm bằng các đoạn mã lập trình trên Arduino IDE. Sử dụng thư viện AccelStepper hoặc Stepper Library để điều chỉnh tốc độ, hướng quay và số bước của động cơ. Điều này giúp đánh giá hiệu quả cấu hình cũng như khả năng đáp ứng của hệ thống.
Ứng dụng thực tế của điều khiển động cơ bước
Máy in 3D và CNC
Động cơ bước được sử dụng để điều khiển chính xác các trục X, Y, Z trong máy in 3D và mô hình CNC. Với sự hỗ trợ của thư viện AccelStepper, việc lập trình để điều khiển các chuyển động phức tạp trở nên dễ dàng hơn. Đây là ứng dụng điển hình giúp nâng cao năng suất và chất lượng sản phẩm.
Robot tự động
Trong các dự án robot tự động, động cơ bước được sử dụng để điều khiển bánh xe hoặc cánh tay robot. Với khả năng điều khiển chính xác, động cơ bước giúp robot di chuyển theo đường đi đã lập trình sẵn, tăng độ ổn định trong các ứng dụng công nghiệp.
Hệ thống tự động hóa
Động cơ bước được tích hợp vào các băng tải, tay máy hoặc thiết bị đo lường trong các hệ thống tự động hóa. Sử dụng tín hiệu PWM và thuật toán điều khiển PID, hệ thống có thể đạt được độ chính xác cao và phản hồi nhanh chóng với các yêu cầu thay đổi.
Mẹo và lưu ý khi sử dụng
Chọn driver phù hợp với động cơ
Đối với động cơ nhỏ gọn, A4988 hoặc ULN2003 là lựa chọn phù hợp nhờ chi phí thấp và dễ sử dụng. Với động cơ lớn hơn, cần sử dụng DRV8825 hoặc các driver công suất cao để đảm bảo động cơ hoạt động hiệu quả mà không bị quá tải.
Nguồn cấp ổn định
Nguồn cấp phải đáp ứng đúng yêu cầu về điện áp và dòng điện của động cơ và driver. Quá tải hoặc cung cấp điện áp không ổn định có thể gây hỏng hóc cho hệ thống.
Sử dụng thư viện đúng cách
Thư viện AccelStepper mang lại nhiều tính năng hữu ích như tăng giảm tốc độ và lập trình nhiều động cơ. Người dùng nên tận dụng các chức năng có sẵn trong thư viện để tối ưu hóa hiệu suất điều khiển.
Điều chỉnh chế độ vi bước
Vi bước giúp cải thiện độ chính xác và giảm rung động của động cơ. Cấu hình vi bước nên được thực hiện dựa trên yêu cầu cụ thể của ứng dụng, chẳng hạn như chế độ Full Step hoặc 1/16 Step cho các ứng dụng cần độ mịn cao.
Kết luận
Điều khiển động cơ bước bằng Arduino là một kỹ thuật quan trọng trong các ngành công nghiệp, tự động hóa và phát triển mô hình DIY. Từ việc lựa chọn phần cứng phù hợp, cấu hình chính xác đến lập trình hiệu quả, hệ thống điều khiển có thể đáp ứng nhiều yêu cầu khác nhau.
Nhờ các thư viện mạnh mẽ như AccelStepper và Stepper Library, Arduino giúp đơn giản hóa quá trình phát triển ứng dụng. Bằng cách áp dụng các kỹ thuật và lưu ý đã trình bày, người dùng có thể triển khai các dự án từ cơ bản đến phức tạp với độ chính xác và ổn định cao.