Khám Phá Bí Quyết Điều Khiển Động Cơ Bước 4 Dây Chính Xác Nhất

Điều khiển động cơ bước 4 dây không chỉ là một kỹ thuật mà còn là cánh cửa mở ra thế giới của sự chính xác và hiệu suất cao. Dù bạn là kỹ sư trẻ đầy nhiệt huyết hay một nhà đầu tư đang tìm hiểu giải pháp công nghệ, động cơ bước sẽ luôn là lựa chọn tối ưu trong các ứng dụng công nghiệp hiện đại. Hãy cùng khám phá cách tận dụng sức mạnh từ động cơ này để nâng cao hiệu quả và tối ưu hóa quy trình sản xuất của bạn.
Giới thiệu động cơ bước 4 dây
Động cơ bước 4 dây là một trong những thành phần quan trọng trong các hệ thống tự động hóa hiện đại. Được thiết kế với độ chính xác cao và khả năng điều khiển linh hoạt, động cơ bước 4 dây đã trở thành lựa chọn hàng đầu trong các ứng dụng như máy CNC, máy in 3D, robot công nghiệp và thiết bị y tế. Với cấu trúc cuộn dây kép và khả năng tạo mô-men xoắn ổn định, động cơ này không chỉ mang lại hiệu suất vượt trội mà còn đảm bảo tính ổn định trong quá trình vận hành.
Điểm khác biệt lớn nhất giữa động cơ bước và các loại động cơ khác như động cơ DC hay động cơ servo là khả năng chia nhỏ góc quay thành các bước cụ thể. Điều này cho phép động cơ bước điều khiển chính xác vị trí và tốc độ của rotor. Các tính năng như tín hiệu xung, trình tự kích hoạt và độ phân giải góc quay cao giúp động cơ bước trở thành giải pháp lý tưởng cho những yêu cầu cần độ chính xác tối ưu.
Nguyên lý hoạt động của động cơ bước 4 dây
Cấu tạo cơ bản
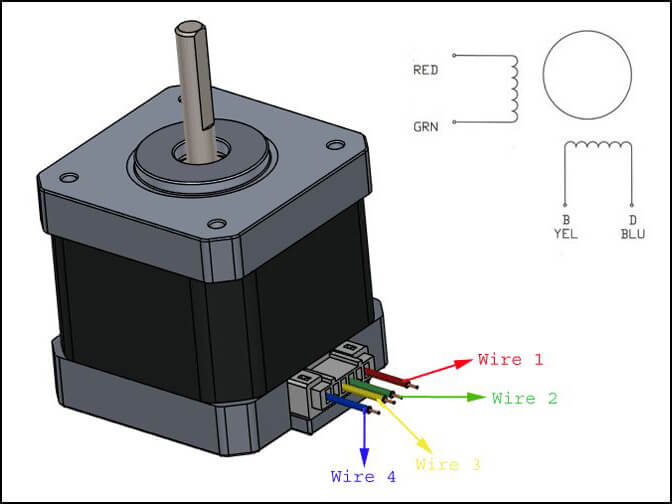
Động cơ bước 4 dây bao gồm hai pha, mỗi pha có hai dây kết nối, tạo thành tổng cộng bốn dây điều khiển. Cuộn dây của động cơ được bố trí theo cách tạo ra từ trường khi có dòng điện chạy qua. Rotor, thường làm bằng nam châm vĩnh cửu hoặc sắt từ, sẽ quay dưới tác động của từ trường sinh ra từ cuộn dây.
Xem thêm: Tổng quan về motor điện
Hệ thống này hoạt động dựa trên nguyên lý điện từ. Khi các cuộn dây được kích hoạt tuần tự, từ trường thay đổi sẽ tác động lên rotor, khiến nó quay theo từng bước với góc quay cố định. Cấu trúc này giúp động cơ hoạt động ổn định và chính xác, đáp ứng được các yêu cầu chuyển động tuần tự trong các ứng dụng công nghiệp.
Nguyên lý chuyển động
Mỗi bước quay của rotor tương ứng với một góc quay cố định, chẳng hạn 1.8 độ đối với động cơ bước tiêu chuẩn. Trình tự kích hoạt cuộn dây được điều khiển bằng tín hiệu xung và tín hiệu pha, đảm bảo rằng rotor luôn quay đúng hướng và đúng góc quay mong muốn. Các yếu tố như dòng điện cấp cho cuộn dây, trình tự kích hoạt và thời gian xung ảnh hưởng trực tiếp đến hiệu suất hoạt động của động cơ.
Độ phân giải bước là yếu tố quyết định độ chính xác của động cơ. Bằng cách tăng số bước trên mỗi vòng quay, động cơ có thể đạt được độ chi tiết cao hơn trong các ứng dụng yêu cầu. Ngoài ra, dòng điện được điều chỉnh phù hợp để tối ưu hóa mô-men xoắn và đảm bảo tốc độ quay ổn định, ngay cả khi tải trọng thay đổi.
Các phương pháp điều khiển động cơ bước 4 dây
Điều khiển dạng sóng
Điều khiển dạng sóng là phương pháp đơn giản nhất, chỉ kích hoạt một cuộn dây tại mỗi bước quay. Phương pháp này giúp tiết kiệm năng lượng nhưng mô-men xoắn tạo ra thấp hơn so với các phương pháp khác. Nó thường được áp dụng trong các hệ thống yêu cầu ít tải trọng hoặc chuyển động đơn giản.
Điều khiển bước đủ
Trong điều khiển bước đủ, hai cuộn dây được kích hoạt đồng thời để tạo ra mô-men xoắn lớn hơn, tăng khả năng chịu tải. Tuy nhiên, phương pháp này tiêu tốn nhiều năng lượng hơn và thường được sử dụng trong các hệ thống cần độ ổn định cao hơn.
Điều khiển nửa bước
Điều khiển nửa bước kết hợp ưu điểm của cả hai phương pháp trên bằng cách luân phiên kích hoạt một và hai cuộn dây. Kết quả là độ phân giải góc quay tăng gấp đôi, giúp động cơ hoạt động mượt mà hơn và phù hợp với các ứng dụng yêu cầu độ chính xác cao.
Điều khiển vi bước
Điều khiển vi bước sử dụng tín hiệu dòng điện biến đổi theo dạng sóng sin để điều khiển cuộn dây. Phương pháp này giúp rotor quay mượt mà, giảm thiểu rung động và tiếng ồn. Đây là lựa chọn lý tưởng cho các ứng dụng như máy in 3D, máy CNC, và robot công nghiệp, nơi yêu cầu chuyển động chính xác và ổn định.
Driver điều khiển và các công cụ hỗ trợ
Driver điều khiển phổ biến
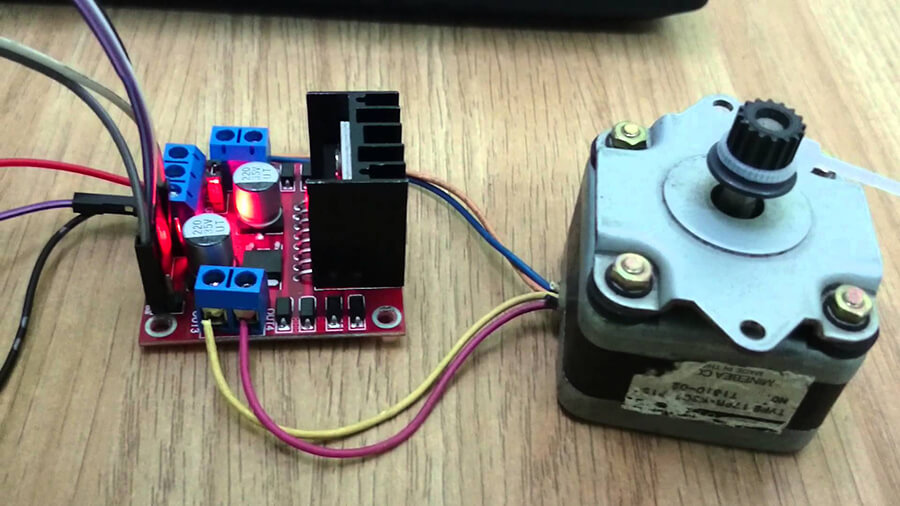
Các driver như A4988, L298N và TB6600 là những giải pháp được sử dụng rộng rãi để điều khiển động cơ bước 4 dây. A4988 phù hợp với các dự án nhỏ sử dụng Arduino, trong khi L298N hỗ trợ dòng cao, lý tưởng cho các hệ thống tải nặng hơn. TB6600 thường được dùng trong máy CNC và máy in 3D nhờ khả năng hỗ trợ các chế độ vi bước linh hoạt.
Hệ thống điều khiển
Arduino là nền tảng phổ biến để lập trình và điều khiển động cơ bước nhờ khả năng xử lý tín hiệu xung và PWM dễ dàng. Kết hợp với phần mềm AccelStepper, Arduino cho phép quản lý trình tự kích hoạt cuộn dây, điều chỉnh tốc độ và tối ưu hóa hiệu suất hoạt động.
Mạch điện hỗ trợ
Mạch H-Bridge là một phần quan trọng trong việc cung cấp tín hiệu điều khiển cho động cơ. Nguồn điện cần được duy trì ổn định để bảo vệ driver và đảm bảo động cơ hoạt động trơn tru. Điều này đặc biệt quan trọng trong các hệ thống yêu cầu hiệu suất cao như robot công nghiệp hoặc máy khắc laser.
Ứng dụng thực tế của động cơ bước 4 dây
Hệ thống tự động hóa
Động cơ bước 4 dây đóng vai trò quan trọng trong các hệ thống tự động hóa như máy CNC, máy in 3D và máy khắc laser. Trong máy CNC, động cơ này điều khiển chính xác vị trí dao cắt, đảm bảo độ chính xác cao trong các công đoạn cắt và khắc. Tương tự, trong máy in 3D, động cơ bước giúp kiểm soát từng lớp in, từ đó tạo ra các sản phẩm có độ chi tiết cao. Đối với máy khắc laser, động cơ bước cho phép điều chỉnh tia laser theo từng bước nhỏ, đáp ứng các yêu cầu khắc phức tạp.
Không chỉ dừng lại ở ngành công nghiệp, động cơ bước còn góp phần nâng cao hiệu suất trong các thiết bị tự động hóa tại nhà máy, nơi yêu cầu điều khiển chuyển động tuần tự và góc quay tiêu chuẩn. Với độ bền và tính linh hoạt, động cơ này hỗ trợ cải tiến quy trình sản xuất và giảm thiểu lỗi trong vận hành.
Robot công nghiệp
Robot công nghiệp sử dụng động cơ bước để điều khiển chuyển động của cánh tay máy và bánh xe. Nhờ độ chính xác trong từng bước quay, động cơ này đảm bảo các robot di chuyển mượt mà và thực hiện các tác vụ phức tạp. Đặc biệt, trong hệ thống tự động hóa sản xuất, động cơ bước đáp ứng yêu cầu chuyển động chính xác để xử lý các công việc lặp đi lặp lại như lắp ráp linh kiện hoặc đóng gói sản phẩm.
Ngoài ra, động cơ bước 4 dây còn được sử dụng trong các robot di động, giúp tối ưu hóa quỹ đạo di chuyển và giữ ổn định khi hoạt động trên địa hình phức tạp. Đây là lựa chọn lý tưởng cho các ứng dụng yêu cầu sự chính xác và độ bền cao.
Thiết bị y tế
Trong ngành y tế, động cơ bước được ứng dụng trong các thiết bị đo lường và chuẩn đoán như máy siêu âm hoặc máy đo huyết áp tự động. Đặc biệt, các thiết bị nhỏ gọn như động cơ bước mini được sử dụng trong máy phẫu thuật hoặc thiết bị điều trị, nơi yêu cầu độ chính xác tuyệt đối và hoạt động ổn định.
Sự ổn định và khả năng kiểm soát tốc độ quay của động cơ bước 4 dây giúp tối ưu hóa quá trình vận hành của các thiết bị y tế, nâng cao hiệu quả chẩn đoán và điều trị. Điều này góp phần quan trọng trong việc cải thiện chất lượng dịch vụ y tế hiện đại.
Ứng dụng khác
Động cơ bước cũng được ứng dụng trong hệ thống vi cơ học, nơi yêu cầu điều khiển chính xác các chuyển động nhỏ. Trong các thiết bị đo lường khoa học, động cơ này giúp kiểm soát các thao tác như quay kính hiển vi hoặc thiết lập góc quay cho các công cụ nghiên cứu. Bên cạnh đó, trong lĩnh vực nhiếp ảnh, động cơ bước được dùng để điều khiển góc quay ống kính, mang lại sự mượt mà trong quá trình lấy nét tự động.
Thiết kế và lập trình hệ thống điều khiển động cơ bước
Thiết kế mạch điện
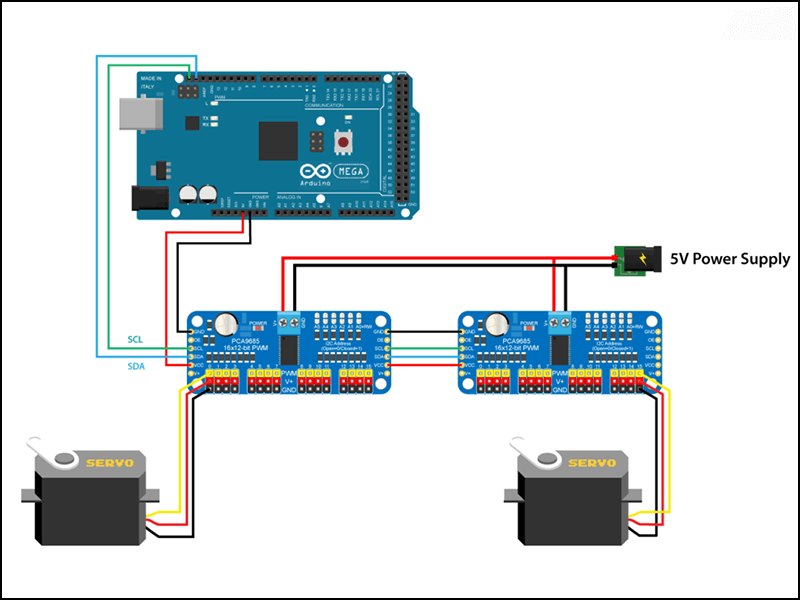
Quá trình thiết kế mạch điện bắt đầu từ việc kết nối cuộn dây động cơ với driver. Cấu hình mạch H-Bridge là yếu tố quan trọng để tạo tín hiệu điều khiển phù hợp, đảm bảo từ trường sinh ra ổn định và duy trì được độ chính xác góc quay. Đồng thời, nguồn điện cấp phải đảm bảo dòng điện ổn định để bảo vệ cả driver và động cơ.
Mỗi phần trong hệ thống cần được kiểm tra kỹ lưỡng, từ cấu trúc cuộn dây đến trình tự kích hoạt. Điều này giúp giảm thiểu lỗi và tối ưu hóa hiệu suất của toàn bộ hệ thống, đặc biệt trong các ứng dụng yêu cầu cao như máy CNC và robot công nghiệp.
Lập trình Arduino và STM32
Arduino và STM32 là hai nền tảng phổ biến trong việc lập trình động cơ bước. Với Arduino, việc sử dụng tín hiệu PWM và lập trình trình tự kích hoạt cuộn dây trở nên đơn giản và dễ thực hiện. Phần mềm AccelStepper hỗ trợ quản lý tín hiệu xung, điều chỉnh tốc độ và mô-men xoắn một cách linh hoạt.
STM32, với hiệu suất cao hơn, phù hợp cho các ứng dụng công nghiệp phức tạp. Lập trình tín hiệu tuần tự liên tục trên STM32 cho phép tối ưu hóa tốc độ và khả năng chịu tải của động cơ. Sự kết hợp giữa phần cứng mạnh mẽ và lập trình chính xác đảm bảo hệ thống vận hành hiệu quả trong thời gian dài.
Kiểm tra và hiệu chỉnh
Quá trình kiểm tra bao gồm việc đảm bảo tín hiệu pha và tín hiệu xung hoạt động ổn định. Điều này giúp động cơ bước duy trì được độ chính xác trong chuyển động và tránh rung lắc không cần thiết. Hiệu chỉnh mô-men xoắn và tốc độ quay cũng là bước quan trọng để tối ưu hóa hiệu suất theo tải trọng thực tế.
Ngoài ra, cần thiết lập các chế độ bảo vệ mạch như giới hạn dòng điện cực đại và làm mát động cơ. Điều này không chỉ kéo dài tuổi thọ của hệ thống mà còn đảm bảo an toàn trong quá trình vận hành.
Các yếu tố quan trọng cần lưu ý
Tính toán góc quay và dòng điện cực đại
Việc tính toán góc quay chính xác và duy trì dòng điện cực đại ổn định là yếu tố cốt lõi để động cơ bước hoạt động hiệu quả. Đặc biệt, trong các ứng dụng đòi hỏi độ chính xác cao như máy in 3D, các thông số này cần được tối ưu hóa để đạt hiệu suất tối đa.
Chế độ bảo vệ mạch
Hệ thống bảo vệ mạch đóng vai trò quan trọng trong việc ngăn ngừa hư hỏng do quá tải hoặc nhiệt độ cao. Việc sử dụng các thiết bị như mạch bảo vệ dòng điện và hệ thống làm mát đảm bảo động cơ hoạt động ổn định trong thời gian dài mà không gặp sự cố.
Phương pháp giảm nhiễu tín hiệu
Để giảm nhiễu tín hiệu, cần sử dụng các bộ lọc và thiết bị điều biến tín hiệu phù hợp. Điều này giúp duy trì sự ổn định trong trình tự kích hoạt và đảm bảo rằng động cơ bước hoạt động trơn tru ngay cả trong các môi trường nhiều nhiễu.
Kết luận
Bài viết đã cung cấp một cái nhìn toàn diện về cách điều khiển động cơ bước 4 dây, từ cấu tạo, nguyên lý hoạt động, phương pháp điều khiển, đến ứng dụng thực tế và thiết kế hệ thống. Động cơ bước 4 dây không chỉ là giải pháp công nghệ tiên tiến mà còn là công cụ quan trọng giúp tối ưu hóa quy trình sản xuất và nâng cao hiệu quả hoạt động trong nhiều lĩnh vực công nghiệp hiện đại. Với sự kết hợp giữa tính linh hoạt, độ chính xác cao và khả năng ứng dụng rộng rãi, động cơ bước sẽ tiếp tục đóng vai trò chủ chốt trong sự phát triển của các hệ thống tự động hóa và công nghệ cao.